El método de Gauss-Jordan es semejante al método de Gauss en los procedimientos para obtener:
la matriz aumentada,
pivoteada por filas
eliminación hacia adelante
El cambio se presenta a partir de la matriz triangular superior, donde se aplica el procedimiento para obtener la solución:
eliminación hacia atrás
Método de Gauss – Jordan
El método de Gauss-Jordan presenta un procedimiento alterno al de «sustitución hacia atrás» realizado para el método de Gauss.
A partir de haber terminado el procedimiento de «eliminación hacia adelante» y haber obtenido la «matriz triangular superior» aumentada, se aplica el procedimiento de. «eliminación hacia atrás».
Se continúa con el ejercicio desde la «matriz triangular superior» aumentada:
La solución del sistema de ecuaciones se presenta como una matriz identidad concatenada a un vector columa de constantes.
solución X es:
[[2.8]
[4.5]
[8.1]]
X= \begin{pmatrix} 2.8\\ 4.5 \\ 8.1 \end{pmatrix}
Observación: en la matriz hay unos valores del orden de 10-16, que corresponden a errores de operaciones en computadora (truncamiento y redondeo) que pueden ser descartados por ser casi cero. Hay que establecer entonces un parámetro para controlar los casos en que la diferencia entre los ordenes de magnitud son por ejemplo menores a 15 ordenes de magnitud 10-15. e implementarlo en los algoritmos.
Algoritmo en Python
Esta sección reutiliza el algoritmo desarrollado para el Método de Gauss, por lo que los bloques de procedimiento son semejantes hasta #eliminación hacia adelante». Se añade el procedimiento de eliminación hacia atras para completar la solución al sistema de ecuaciones.
El algoritmo desarrollado por partes:
# Método de Gauss-Jordan# Solución a Sistemas de Ecuaciones# de la forma A.X=Bimport numpy as np
# INGRESO
A = np.array([[4,2,5],
[2,5,8],
[5,4,3]])
B = np.array([[60.70],
[92.90],
[56.30]])
# PROCEDIMIENTO
casicero = 1e-15 # Considerar como 0# Evitar truncamiento en operaciones
A = np.array(A,dtype=float)
# Matriz aumentada
AB = np.concatenate((A,B),axis=1)
AB0 = np.copy(AB)
# Pivoteo parcial por filas
tamano = np.shape(AB)
n = tamano[0]
m = tamano[1]
# Para cada fila en ABfor i inrange(0,n-1,1):
# columna desde diagonal i en adelante
columna = abs(AB[i:,i])
dondemax = np.argmax(columna)
# dondemax no está en diagonalif (dondemax !=0):
# intercambia filas
temporal = np.copy(AB[i,:])
AB[i,:] = AB[dondemax+i,:]
AB[dondemax+i,:] = temporal
AB1 = np.copy(AB)
# eliminacion hacia adelantefor i inrange(0,n-1,1):
pivote = AB[i,i]
adelante = i + 1
for k inrange(adelante,n,1):
factor = AB[k,i]/pivote
AB[k,:] = AB[k,:] - AB[i,:]*factor
AB2 = np.copy(AB)
# elimina hacia atras
ultfila = n-1
ultcolumna = m-1
for i inrange(ultfila,0-1,-1):
pivote = AB[i,i]
atras = i-1
for k inrange(atras,0-1,-1):
factor = AB[k,i]/pivote
AB[k,:] = AB[k,:] - AB[i,:]*factor
# diagonal a unos
AB[i,:] = AB[i,:]/AB[i,i]
X = np.copy(AB[:,ultcolumna])
X = np.transpose([X])
# SALIDAprint('Matriz aumentada:')
print(AB0)
print('Pivoteo parcial por filas')
print(AB1)
print('eliminacion hacia adelante')
print(AB2)
print('eliminación hacia atrás')
print(AB)
print('solución de X: ')
print(X)
Tarea: implementar caso cuando aparecen ceros en la diagonal para dar respuesta, convertir a funciones cada parte
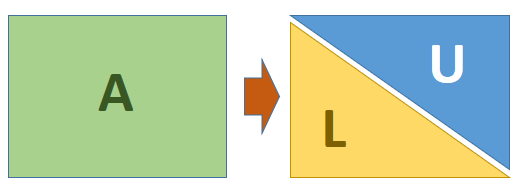
Una matriz A puede separarse en dos matrices triangulares:
L de tipo triangular inferior
U de tipo triangular superior
que entre ellas tienen la propiedad que: A = L.U
La matriz U se obtiene después de aplicar el proceso de «eliminación hacia adelante» del método de Gauss.
La matriz L contiene los factores usados en el proceso de «eliminación hacia adelante» del método de Gauss, escritos sobre una matriz identidad en las posiciones donde se calcularon.
Ejercicio
Ejemplo Chapra 10.1 p285, pdf309
Presente las matrices LU de la matriz A siguiente:
Realizado a partir del algoritmo de la sección «método de Gauss» y modificando las partes necesarias para el algoritmo.
Para éste algoritmo, se procede desde el bloque de «pivoteo por filas, continuando con el algoritmo de «eliminación hacia adelante» del método de Gauss. Procedimientos que dan como resultado la matriz U.
La matriz L requiere iniciar con una matriz identidad, y el procedimiento requiere que al ejecutar «eliminación hacia adelante» se almacene cada factor con el que se multiplica la fila para hacer cero. El factor se lo almacena en la matriz L, en la posición de dónde se determinó el factor.
# Matrices L y U# Modificando el método de Gaussimport numpy as np
# INGRESO
A = np.array([[ 3. , -0.1, -0.2],
[ 0.1, 7. , -0.3],
[ 0.3, -0.2, 10. ]], dtype=float)
B = np.array([7.85,-19.3,71.4], dtype=float)
# PROCEDIMIENTO
B = np.transpose([B])
AB = np.concatenate((A,B),axis=1)
AB = np.copy(AB)
# Pivoteo parcial por filas
tamano = np.shape(AB)
n = tamano[0]
m = tamano[1]
# Para cada fila en ABfor i inrange(0,n-1,1):
# columna desde diagonal i en adelante
columna = abs(AB[i:,i])
dondemax = np.argmax(columna)
# dondemax no está en diagonalif (dondemax !=0):
# intercambia filas
temporal = np.copy(AB[i,:])
AB[i,:] = AB[dondemax+i,:]
AB[dondemax+i,:] = temporal
AB1 = np.copy(AB)
A1 = np.copy(AB[:,:m-1])
B1 = np.copy(AB[:,m-1])
# eliminacion hacia adelante# se inicializa L
L = np.identity(n,dtype=float)
for i inrange(0,n-1,1):
pivote = AB[i,i]
adelante = i+1
for k inrange(adelante,n,1):
factor = AB[k,i]/pivote
AB[k,:] = AB[k,:] - AB[i,:]*factor
L[k,i] = factor
U = np.copy(AB[:,:m-1])
# SALIDAprint('Pivoteo parcial por filas')
print(AB1)
print('eliminación hacia adelante')
print('Matriz U: ')
print(U)
print('matriz L: ')
print(L)
Si se requiere una respuesta unificada en una variable, se puede convertir en una arreglo de matrices [L,U].
Las matrices L y U se pueden leer como L=LU[0] y U=LU[1]
LU = np.array([L,U])
# SALIDAprint('triangular inferior L')
print(LU[0])
print('triangular superior U')
print(LU[1])
Tarea
Verificar los resultados, y considerar las divisiones para cero y «casicero».
El determinante de una matriz cuadrada triangular superior también puede calcularse como el producto de los coeficientes de la diagonal principal, considerando el número de cambios de fila del pivoteo.
det(A) = (-1)^k \prod_{i=1}^n a_{i,i}
Si observamos que en las secciones anteriores se tiene desarrollado los algoritmos para obtener la matriz triangular superior en el método de Gauss, se usan como punto de partida para obtener los resultados del cálculo del determinante.
El algoritmo parte de lo realizado en método de Gauss, indicando que la matriz a procesar es solamente A. Se mantienen los procedimientos de «pivoteo parcial por filas» y » eliminación hacia adelante»
Para contar el número de cambios de filas, en la sección de pivoteo se añade un contador cambiofilas en el condicional de cambio de filas.
Para el resultado del operador multiplicación, se usan todas las casillas de la diagonal al acumular las multiplicaciones.
Se aplica la operación de la fórmula planteada para el método, y se presenta el resultado.
# Determinante de una matriz A# convirtiendo a diagonal superior import numpy as np
# INGRESO
A = np.array([[3. , -0.1, -0.2],
[0.1, 7. , -0.3],
[0.3, -0.2, 10. ]])
# PROCEDIMIENTO# Matriz aumentada
AB = np.copy(A)
# Pivoteo parcial por filas
cambiofila = 0 # contador
tamano = np.shape(AB)
n = tamano[0]
m = tamano[1]
# Para cada fila en ABfor i inrange(0,n-1,1):
# columna desde diagonal i en adelante
columna = abs(AB[i:,i])
dondemax = np.argmax(columna)
# dondemax no está en diagonalif (dondemax !=0):
# intercambia filas
cambiofila = cambiofila +1
temporal = np.copy(AB[i,:])
AB[i,:] = AB[dondemax+i,:]
AB[dondemax+i,:] = temporal
AB1 = np.copy(AB)
# eliminación hacia adelantefor i inrange(0,n-1,1):
pivote = AB[i,i]
adelante = i + 1
for k inrange(adelante,n,1):
factor = AB[k,i]/pivote
AB[k,:] = AB[k,:] - AB[i,:]*factor
# calcula determinante
multiplica = 1
for i inrange(0,n,1):
multiplica = multiplica*AB[i,i]
determinante = ((-1)**cambiofila)*multiplica
# SALIDAprint('Pivoteo parcial por filas')
print(AB1)
print('eliminación hacia adelante')
print(AB)
print('determinante: ')
print(determinante)
El método de Gauss opera sobre la matriz aumentada y pivoteada por filas, añadiendo el proceso de «eliminación hacia adelante» mediante la operación entre filas. Se continúa entonces desde el resultado del tema de 3.2 pivoteo parcial por filas para matrices:
Eliminación hacia adelante o eliminación Gaussiana
Consiste en simplificar la matriz a una triangular superior, con ceros debajo de la diagonal, usando operaciones entre filas.
Los índices de fila y columna, A[i,j], se usan de forma semejante a la nomenclatura de los textos de Álgebra Lineal. Progresivamente para cada fila, se toma como referencia o pivote el elemento de la diagonal (i=j). Luego, se realizan operaciones con las filas inferiores para convertir los elementos por debajo de la diagonal en cero. Las operaciones incluyen el vector B debido a que se trabaja sobre la matriz aumentada AB.
Con lo que se completa el objetivo de tener ceros debajo de la diagonal.
Observe que no es necesario realizar operaciones para la última fila, por lo que k debe llegar solamente hasta la fila penúltima.
El resultado de la eliminación hacia adelante a ser usado en el próximo paso es:
Para una fila i, el vector b[i] representa el valor de la constante en la fila i de la matriz aumentada, a[i] se refiere los valores de los coeficientes de la ecuación, de los que se usan los que se encuentran a la derecha de la diagonal.
Las operaciones se realizan de abajo hacia arriba desde la última fila. Para el ejercicio presentado se tiene que:
realice las operaciones con los valores encontrados para X2 y X3
Se encuentra que la solución al sistema de ecuaciones es:
X= \begin{pmatrix} 2.8\\ 4.5 \\ 8.1 \end{pmatrix}
por sustitución hacia atras
el vector solución X es:
[[2.8]
[4.5]
[8.1]]
Verificar respuesta
Para verificar que el resultado es correcto, se usa el producto punto entre la matriz a y el vector resultado X. La operación A.X = B debe dar el vector B.
verificar que A.X = B
[[60.7]
[92.9]
[56.3]]
Método de Gauss con Algoritmo en Python
El algoritmo en su primera parte reutiliza lo desarrollado en Python para la matriz aumentada y pivoteo parcial por filas.
Recordar: Asegurar que los arreglos sean de tipo Real (float), para que no se considere el vector como entero y realice operaciones entre enteros, generando errores por truncamiento.
La parte nueva a desarrollar corresponde al procedimiento de «eliminación hacia adelante» y el procedimiento de «sustitución hacia atrás».
# Método de Gauss# Solución a Sistemas de Ecuaciones# de la forma A.X=Bimport numpy as np
# INGRESO
A = np.array([[4,2,5],
[2,5,8],
[5,4,3]])
B = np.array([[60.70],
[92.90],
[56.30]])
# PROCEDIMIENTO
casicero = 1e-15 # Considerar como 0# Evitar truncamiento en operaciones
A = np.array(A,dtype=float)
# Matriz aumentada
AB = np.concatenate((A,B),axis=1)
AB0 = np.copy(AB)
# Pivoteo parcial por filas
tamano = np.shape(AB)
n = tamano[0]
m = tamano[1]
# Para cada fila en ABfor i inrange(0,n-1,1):
# columna desde diagonal i en adelante
columna = abs(AB[i:,i])
dondemax = np.argmax(columna)
# dondemax no está en diagonalif (dondemax !=0):
# intercambia filas
temporal = np.copy(AB[i,:])
AB[i,:] = AB[dondemax+i,:]
AB[dondemax+i,:] = temporal
AB1 = np.copy(AB)
# eliminación hacia adelantefor i inrange(0,n-1,1):
pivote = AB[i,i]
adelante = i + 1
for k inrange(adelante,n,1):
factor = AB[k,i]/pivote
AB[k,:] = AB[k,:] - AB[i,:]*factor
# sustitución hacia atrás
ultfila = n-1
ultcolumna = m-1
X = np.zeros(n,dtype=float)
for i inrange(ultfila,0-1,-1):
suma = 0
for j inrange(i+1,ultcolumna,1):
suma = suma + AB[i,j]*X[j]
b = AB[i,ultcolumna]
X[i] = (b-suma)/AB[i,i]
X = np.transpose([X])
# SALIDAprint('Matriz aumentada:')
print(AB0)
print('Pivoteo parcial por filas')
print(AB1)
print('eliminación hacia adelante')
print(AB)
print('solución: ')
print(X)
Tarea
Revisar cuando la matriz pivoteada por filas tienen un elemento cero o muy cercano a cero pues la matriz sería singular. El valor considerado como casi cero podría ser 1×10-15
A estas alturas, por la cantidad de líneas de instrucción es recomendable reutilizar bloques de algoritmos usando funciones def-return. Por ejemplo: pivoteo por filas, eliminación hacia adelante, sustitución hacia atrás
Los métodos de solución a sistema de ecuaciones, tienen en los primeros pasos en común usar la matriz aumentada y pivoteada por filas. Para compartir estos pasos y simplificar la presentación de los métodos, se presentan como una de las primeros algoritmos a implementar.
Para mostrar todo el desarrollo del proceso se usa como referencia un ejercicio.
Ejercicio
Referencia: Rodriguez cap4.0 Ejemplo 1 pdf.105
Ejemplo 1. Un comerciante compra tres productos A, B, C, pero en las facturas únicamente consta la cantidad comprada en Kg y el valor total de la compra. Se necesita determinar el precio unitario de cada producto. Dispone de solo tres facturas con los siguientes datos:
Ejemplo:
Cantidad
Valor ($)
Factura
X1
X2
X3
Pagado
1
4
2
5
60.70
2
2
5
8
92.90
3
5
4
3
56.30
Los precios unitarios se pueden representar por las variables x1, x2, x3 para escribir el sistema de ecuaciones que muestran las relaciónes de cantidad, precio y valor pagado:
Para el pivoteo por fila de la matriz aumentada AB, tiene como primer paso revisar la primera columna desde la diagonal en adelante.
columna = [|4|,
|2|,
|5|]
dondemax = 2
El procedimiento de pivoteo se realiza si la posición dónde se encuentra el valor de mayor magnitud no corresponde a la diagonal de la matriz (posición 0 de la columna).
En el ejercicio se encuentra que la magnitud de mayor valor está en la última fila, por lo que en AB se realiza el intercambio entre la fila 3 y la fila 1
Para realizar el algoritmo, es de recordar que para realizar operaciones en una matriz sin alterar la original, se usa una copia de la matriz (np.copy). Se puede comparar y observar los cambios entre la matriz original y la copia a la que se aplicaron cambios
Si no es necesaria la comparación entre el antes y despues, no se realiza la copia y se ahorra el espacio de memoria, detalle importante para matrices de «gran tamaño» y una computadora con «limitada» memoria.
# Pivoteo parcial por filas# Solución a Sistemas de Ecuacionesimport numpy as np
# INGRESO
A = np.array([[4,2,5],
[2,5,8],
[5,4,3]])
B = np.array([[60.70],
[92.90],
[56.30]])
# PROCEDIMIENTO# Matriz aumentada
AB = np.concatenate((A,B),axis=1)
AB0 = np.copy(AB)
# Pivoteo parcial por filas
tamano = np.shape(AB)
n = tamano[0]
m = tamano[1]
# Para cada fila en ABfor i inrange(0,n-1,1):
# columna desde diagonal i en adelante
columna = abs(AB[i:,i])
dondemax = np.argmax(columna)
# dondemax no está en diagonalif (dondemax !=0):
# intercambia filas
temporal = np.copy(AB[i,:])
AB[i,:] = AB[dondemax+i,:]
AB[dondemax+i,:] = temporal
# SALIDAprint('Matriz aumentada:')
print(AB0)
print('Pivoteo parcial por filas')
print(AB)
Función pivoteafila(M)
Los bloques de cada procedimiento que se repiten en otros métodos se convierten a funciones def-return, empaquetando las soluciones algoritmicas a problemas resueltos.
Se usa la matriz M para generalizar y diferenciar de A que es usada en los ejercicios en realizados en adelante.
defpivoteafila(M):
'''
Pivotea parcial por filas
Si hay ceros en diagonal es matriz singular,
Tarea: Revisar si diagonal tiene ceros
'''# Pivoteo por filas AB
tamano = np.shape(M)
n = tamano[0]
m = tamano[1]
# Para cada fila en ABfor i inrange(0,n-1,1):
# columna desde diagonal i en adelante
columna = np.abs(M[i:,i])
dondemax = np.argmax(columna)
# dondemax no es en diagonalif (dondemax != 0):
# intercambia filas
temporal = np.copy(M[i,:])
M[i,:] = M[dondemax+i,:]
M[dondemax+i,:] = temporal
return(M)
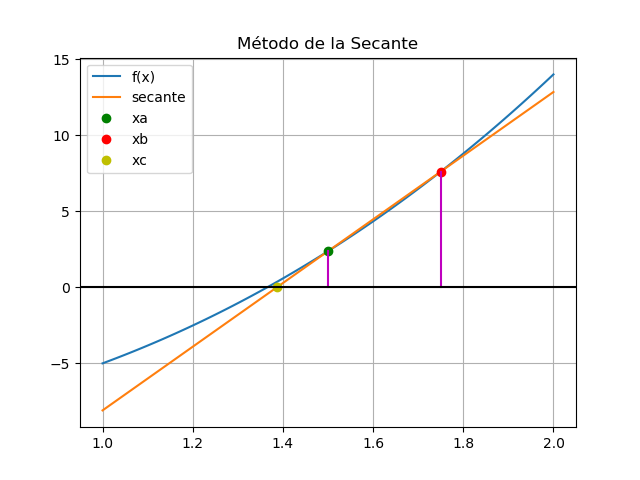
La ecuación mostrada tiene una raíz en el intervalo [1,2], ya que f(1) = -5 y f(2) = 14
Muestre los resultados parciales del algoritmo de la secante con una tolerancia de 0.0001
# Método de la secante# Ejemplo 1 (Burden ejemplo 1 p.51/pdf.61)import numpy as np
defsecante_tabla(fx,xa,tolera):
dx = 4*tolera
xb = xa + dx
tramo = dx
tabla = []
while (tramo>=tolera):
fa = fx(xa)
fb = fx(xb)
xc = xa - fa*(xb-xa)/(fb-fa)
tramo = abs(xc-xa)
tabla.append([xa,xb,xc,tramo])
xb = xa
xa = xc
tabla = np.array(tabla)
return(tabla)
# PROGRAMA ---------------------# INGRESO
fx = lambda x: x**3 + 4*x**2 - 10
a = 1
b = 2
xa = 1.5
tolera = 0.001
tramos = 100
# PROCEDIMIENTO
tabla = secante_tabla(fx,xa,tolera)
n = len(tabla)
raiz = tabla[n-1,2]
# SALIDA
np.set_printoptions(precision=4)
print('[xa ,\t xb , \t xc , \t tramo]')
for i inrange(0,n,1):
print(tabla[i])
print('raiz en: ', raiz)
En el caso de añadir la gráfica para la primera iteración:
# GRAFICAimport matplotlib.pyplot as plt
# Calcula los puntos a graficar
xi = np.linspace(a,b,tramos+1)
fi = fx(xi)
dx = (b-xa)/2
pendiente = (fx(xa+dx)-fx(xa))/(xa+dx-xa)
b0 = fx(xa) - pendiente*xa
tangentei = pendiente*xi+b0
fxa = fx(xa)
xb = xa + dx
fxb = fx(xb)
plt.plot(xi,fi, label='f(x)')
plt.plot(xi,tangentei, label='secante')
plt.plot(xa,fx(xa),'go', label='xa')
plt.plot(xa+dx,fx(xa+dx),'ro', label='xb')
plt.plot((-b0/pendiente),0,'yo', label='xc')
plt.plot([xa,xa],[0,fxa],'m')
plt.plot([xb,xb],[0,fxb],'m')
plt.axhline(0, color='k')
plt.title('Método de la Secante')
plt.legend()
plt.grid()
plt.show()
Scipy.optimize.newton – Secante
El método de la secante se encuentra implementado en Scipy en la forma de algoritmo de newton, que al no proporcionar la función para la derivada de f(x), usa el método de la secante:
>>> import scipy.optimize as opt
>>> opt.newton(fx,xa, tol=tolera)
1.3652320383201266