Cálculo de Varias Variables
Ecuaciones Paramétricas
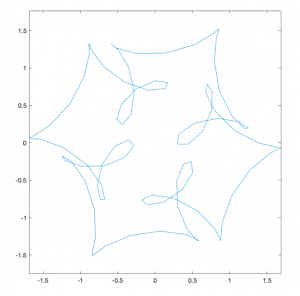
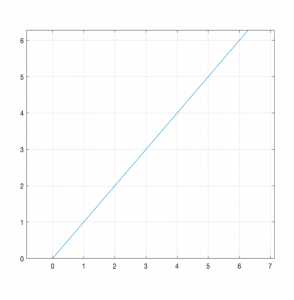
Cuando necesitamos representar una trayectoria de un robot móvil , debemos usar las ecuaciones paramétricas. En las ecuaciones paramétricas los puntos de la función están dados por los puntos (x ,y) en función de una variable independiente, por ejemplo t , que representa al tiempo.
Usando MATLAB o cualquier otra plataforma que grafique funciones paramétricas podemos graficar una
circunferencia.
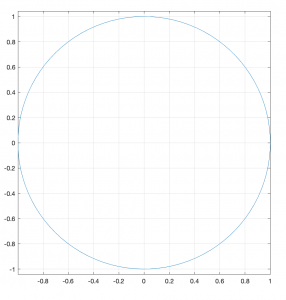
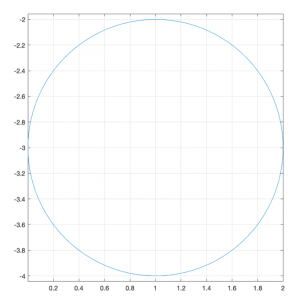
Ejemplo: Codigo de MATLAB para graficar una circunferencia
clearvars;
t=linspace(0,2*pi,100); % Definimos el rango
x=cos(t); % Ecuación paramétrica de x en funcioón de t
y=sin(t); % Ecuación paramétrica de y en funcion de t
plot(x,y) ,axis equal; % Instrucción de graficar y mostrar los ejes en proporción 1:1
F1
F2
F3
F2
F4

F5
F1
F6
F1
F7
F8
F9