
Referencia: Lathi 1.8-1 p111. Oppenheim problema 2.61c p164, Ejemplo 9.24 p700
Un diferenciador D representa un sistema inestable, pues para una entrada acotada como el escalón μ(t) resulta en una salida no acotada como el impulso unitario δ(t). Un sistema con diferenciadores expuesto a ruido amplifica el ruido.
Para los diagramas de bloques y simuladores se prefiere usar integradores (1/D) ≈ (1/s).
Con el problema planteado, en ésta sección se cambia la expresión de la ecuación, ubicando el operador D de mayor grado a la izquierda:
D^2 y(t) + 3Dy(t) + 2y(t) = 0 D^2 y(t) = - 3Dy(t) - 2y(t)La expresión es semejante a lo realizado para el método de Runge-Kutta presentado en la sección con Python.
Se despeja la respuesta para y(t) del lado izquierdo:
\frac{D^2 y(t)}{D^2} = \frac{-3Dy(t) - 2y(t)}{D^2} y(t) = -3 \frac{1}{D} y(t) - 2 \frac{1}{D^2} y(t)La forma de la ecuación permite crear el diagrama del sistema, usando 1/D como un integrador y 1/D2 representa una segunda integración en serie.
Los coeficientes de los términos se ubican como ganancias retroalimentadas.

Los valores iniciales se configuran en los integradores observando cual salida se usará en el sumador.
Respuesta entrada cero: [Desarrollo Analítico] [Sympy-Python] [Scipy-Python ] [Runge-Kutta d2y/dx2] [Simulador]
3.1 Usando el Simulador XCOS-Scilab
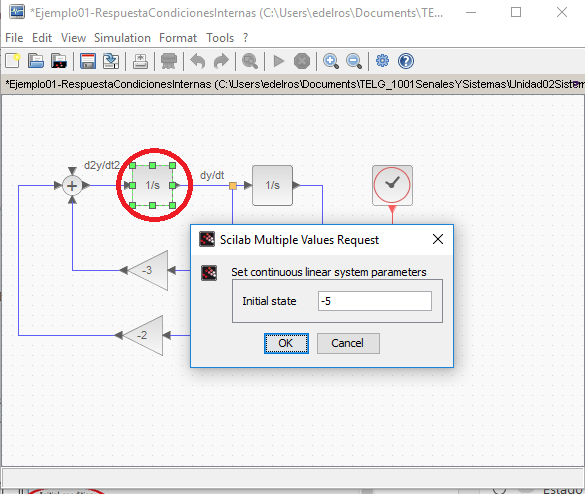
Para XCOS, se añade un visor de señal de salida (Sinks/Scope) y un reloj de muestreo. Para y'(0)=5 siguiendo el diagrama se ubica y'(t)=dy/dt como la salida del primer integrador . El valor se cambia dando doble click al elemento marcado en rojo y escribiendo el valor de -5.
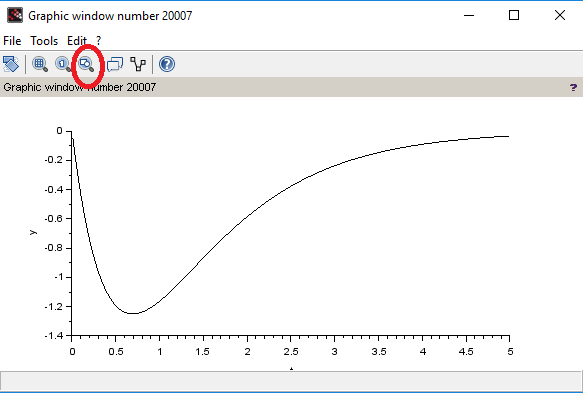
La gráfica se obtiene usando el osciloscopio (scope)
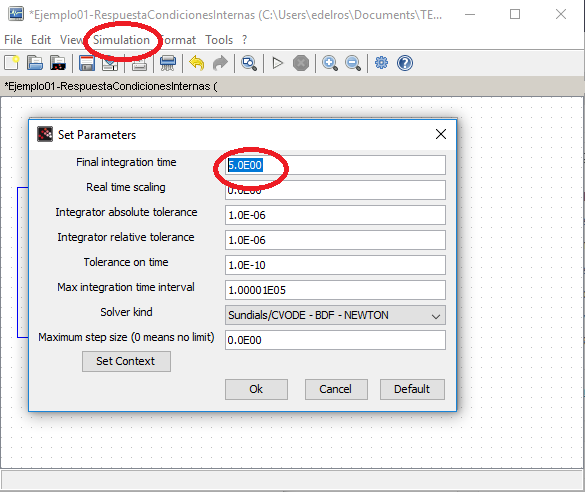
 El tiempo de observación se establece con el valor de «Simulatión/Final Integration time» a 5 segundos.
El tiempo de observación se establece con el valor de «Simulatión/Final Integration time» a 5 segundos.
De forma semejante se puede realizar el ejercicio en otros simuladores, como por ejemplo Simulink-Matlab.
3.2 Desarrollo como circuito en simulador
La simulación en forma de circuito usando las herramientas de Simulink/Matlab y SimPowerSystems, para cada componente (Elements) se crea con «Series RLC Branch».
Para extraer las lecturas de las señal se usa un medidor (Measurements) que se ubica en serie con los demás componentes y se visualiza con un osciloscopio (Simulink/Commonly Used Blocks/Scope).

Las conexiones son similares a las que se usarían en el laboratorio. Se puede observar que las respuestas serán las mismas.
Las condiciones iniciales se pueden establecer en los componentes que pueden tener un valor inicial como el capacitor en 5 voltios.
El signo de la corriente de salida ya está incluido en la inversión de polaridad respecto a la polaridad de la fuente.
Respuesta entrada cero: [Desarrollo Analítico] [Sympy-Python] [Scipy-Python ] [Runge-Kutta d2y/dx2] [Simulador]