3ra Evaluación I Término 2012-2013. 13/Septiembre/2012. TELG1001
Tema 1. (25 puntos) Asumiendo causalidad para los sistemas en serie h1[n] y h2[n], se le solicita que mediante la utilización de la transformada z, determine la respuesta impulso h1[n], si se conoce y[n]:
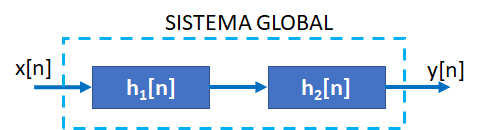

a. La respuesta del segundo sistema está dada por:
h_2 [n] = \delta[n] - \delta[n-1]b. Si dada la entrada x[n] se obtiene una salida y[n] esquematizada por:
x [n] = \mu [n] - \mu [n-2]Coordinador: Tama Alberto