Los sistemas pueden crearse a partir de subsistemas más sencillos. La interconexión entre los sistemas permite resolver por partes los problemas de mayor complejidad y luego integrar sus respuestas.
La interconexión de dos sistemas puede ser realizada de varias formas:
1. Interconexión en serie (cascada)
2. Interconexión en paralelo
3. Interconexión en serie-paralelo
4. Interconexión con retroalimentación
Para ilustrar las formas de interconexión de forma gráfica se usan los diagramas de bloques, al interconectar las salidas y entradas entre bloques.
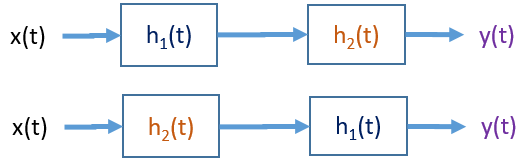
Interconexión en serie
El diagrama de bloques representa la conexión de subsistemas en forma secuencial usando la salida a una entrada del siguiente..
Ejemplo: la salida de video de la computadora hacia la entrada de video del proyector en el aula de clases, usada para proyectar el contenido del curso.
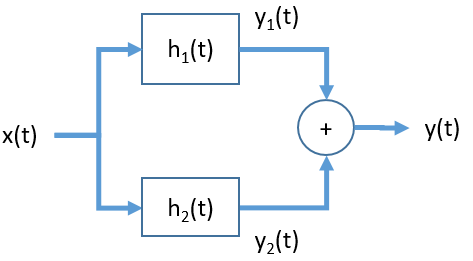
Interconexión en Paralelo
El diagrama de bloques muestra que la señal de entrada se aplica de forma simultánea o en paralelo a dos los subsistemas, el símbolo ‘+’ expresa que el resultado es la suma de los resultados de los sistemas h1(t) y h2(t).
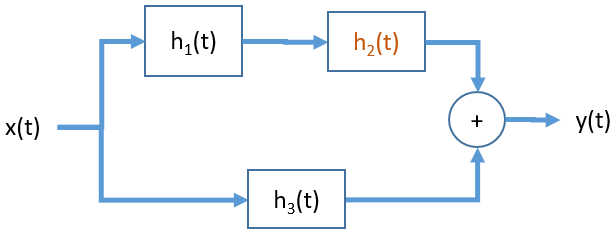
Interconexión serie-paralelo
Se añade el diagrama de bloques para la conexión en paralelo de un subsistema en serie h1(t) y h2(t), en paralelo con un subsistema h3(t)
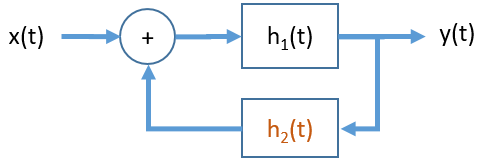
Interconexión con retroalimentación
Los sistemas retroalimentados permiten «regular» la salida «observando» una parte de la misma
En un sistema contínuo las señales contínuas de entrada son transformadas en señales contínuas de salida.
x(t) \rightarrow y(t)
Por ejemplo el «audio» de una voz cantando en un micrófono es una entrada contínua, que al pasar por el sistema de amplificadores se obtiene una señal contínua eléctrica de salida hacia los parlantes.
Cuando las entradas de tiempo son muestras discretas se transforman en salidas de tiempo discreto, al sistema se denomina «sistema discreto«.
Simbólicamente se representa como:
x[n] \rightarrow y[n]
Por ejemplo un filoscopio, flipbook o libro animado usa entradas y salidas de tiempo discretas.
Sistemas Analógicos y Digitales
Referencia: Lathi 1.7-6 p79, 1.3-2 p78
Un sistema con señales de entradas y salidas analógicas o contínuas se lo denomina» sistema analógico».
De forma semejante, un sistema cuyas entradas y salidas son digitales es un sistema digital, como una computadora, aunque también se conoce como un sistema discreto en el tiempo.
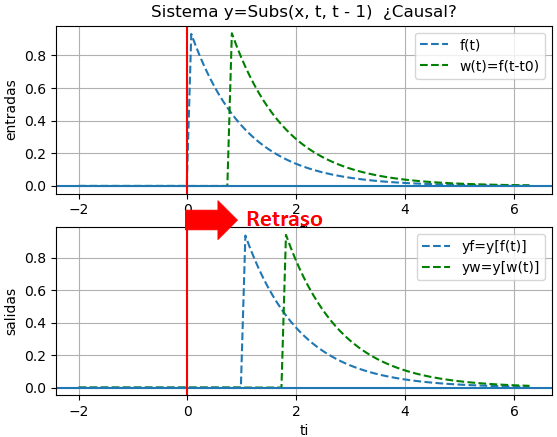
Un sistema es CAUSAL (no-anticipativo o físico) si la salida y(t) en un valor arbitrario de tiempo t=t0 depende solo de la entrada x(t) para t ≤ t0 , es decir depende solo de los valores presentes y/o pasados de la entrada; no depende de valores futuros.
No es posible obtener una salida antes que se aplique la entrada.
Ejemplos 1. desplazamiento en tiempo, retraso
Referencia: Hsu 1.5.D p17
y(t) = x(t - 1)
Para observar mejor el sistema del ejemplo, se inicia con un desplazamiento negativo. Si t es en segundos, la salida depende de los valores de xhace un segundo atrás (t-1)
Usando como entrada:
x(t) = e^{-t} \mu (t)
1 - t
yf = e *Heaviside(t - 1)
1 - t
yw = 2.11700001661267*e *Heaviside(t - 1.75)
Considere los eventos de interés mundial que se transmiten con un retraso de segundos para corregir «fallos» o por seguridad, se puede aún editar lo que los espectadores en televisión pueden observar, en tiempo «casi real»
Por ejemplo:
» La cadena de televisión NBC transmitirá la ceremonia de apertura de los Juegos Olímpicos de Río de Janeiro 2016 con una hora de retraso … eso permitirá a los productores «curar» la cobertura para proporcionar un contexto adecuado.»
«In radio and television, broadcast delay is an intentional delay when broadcasting live material. Such a delay may be short (often seven seconds) to prevent mistakes or unacceptable content from being broadcast.»
https://en.wikipedia.org/wiki/Broadcast_delay
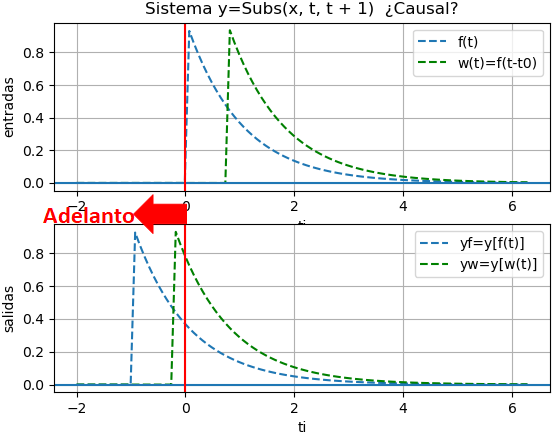
En el caso contrario, los sistemas NO CAUSALES muestran una salida anticipada a la señal de entrada. ¿es posible? ¿cómo?
Ejemplo 2. desplazamiento en tiempo, adelanto
Referencia: Hsu 1.5.D p17
y(t) = x(t + 1)
si t es en minutos o años, la salida depende de los valores que x(t) tendría un minuto o año después o (t+1).
Si t es en días, la situación se vuelve complicada de realizar, es como decir: para determinar el valor de la variable y(t) HOY, necesitamos conocer el valor de x(t+1) que es MAÑANA.
Los sistemas no-casuales por tener variable independiente referenciada a tiempo futuro, no se pueden implementar en tiempo real. Sin embargo si los sistemas no causales se realizan con variables diferentes al tiempo, por ejemplo «espacio» se podrían implementar.
Usando como entrada, la misma que el ejemplo anterior
x(t) = e^{-t} \mu (t)
-t - 1
yf = e *Heaviside(t + 1)
-t - 1
yw = 2.11700001661267*e *Heaviside(t + 0.25)
Aunque si considera que los datos de tiempo registrado para un evento, el análisis se puede realizar en un rango donde los no-causales aún se podrían analizar o procesar aunque no en tiempo real.
Ejemplo 3. Sistema con amplitud variable en tiempo (AM)
Referencia: Oppenheim Ejemplo 1.12 p47
Considere el sistema dado por:
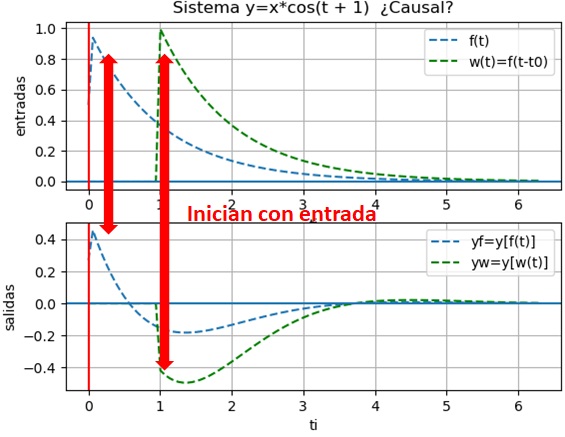
y(t) = x(t) \cos(t+1)
En este sistema, la salida en cualquier tiempo t es igual a la entrada en el mismo tiempo t multiplicada por un número que varia en el tiempo. Usando q(t) = cos(t+1) que es una función variante en el tiempo, el sistema puede escribirse como
y(t) = x(t) q(t)
Se observa que solo el valor actual de la entrada x(t) influye en el valor de salida de y(t). Se concluye que el sistema es causal y también sin memoria.
Usando como entrada
x(t) = e^{-t} \mu (t)
resultados con algoritmo:
-t
yf = e *cos(t + 1)*Heaviside(t)
-t
yw = 2.71828182845905*e *cos(t + 1)*Heaviside(t - 1.0)
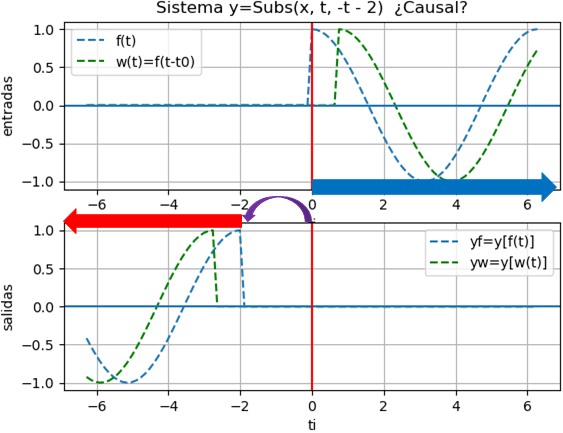
Ejemplo 4. Adelanto e Inversión en tiempo
y(t) = x(-(t+2))
Suponga que x(t) = cos(t) μ(t) para hacer notar el inicio de la señal de entrada
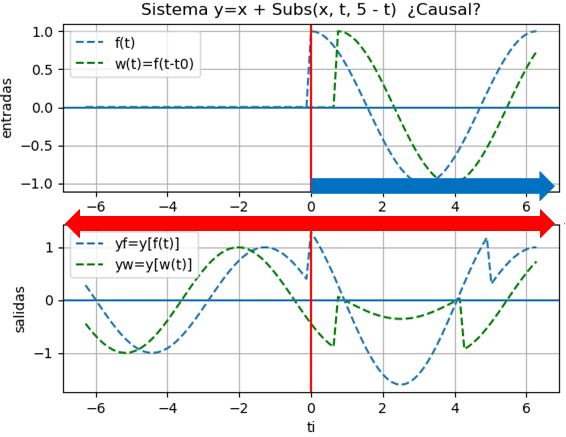
Ejemplo 5. desplazamiento e inversión en tiempo
y(t) = x(t)+x(5-t)
Suponga que x(t) = cos(t) μ(t) para hacer notar el inicio de la señal de entrada
Los sistemas sin memoria también se conocen como instantaneos, que son un caso particular de los sistemas dinámicos (con memoria).
Un sistema cuya respuesta en t está determinada por los anteriores T segundos, es decir el intervalo (t–T), se lo conoce como «sistema con memoria finita»
Si el comportamiento de un sistema y sus parámetros no cambian en el tiempo, se los denomina sistemas invariantes en el tiempo.
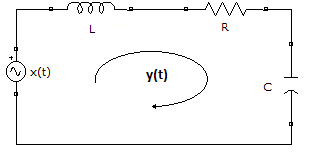
Por ejemplo, para un circuito RC, los valores de la resistencia y capacitor fijos no varian si se realiza un experimento o medición hoy o mañana.
Expresando lo mismo como:
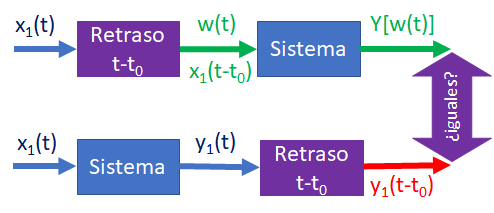
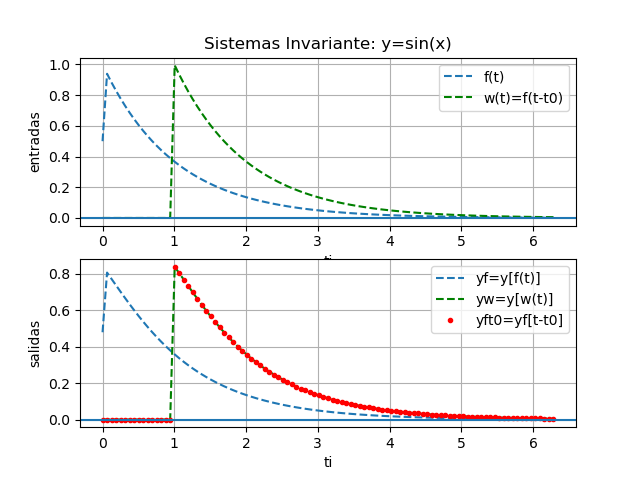
Un sistema es invariante en el tiempo si, ante un desplazamiento de tiempo en la señal de entrada, se ocasiona el mismo desplazamiento en el tiempo en la señal de salida. El resultado se repite si el desplazamiento del tiempo se aplica a la salida del sistema en lugar de la entrada.
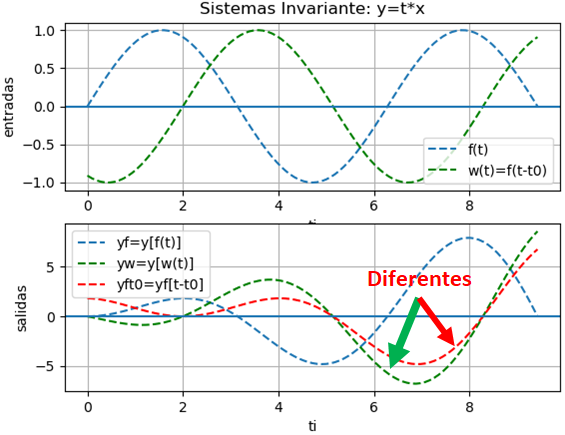
Para muestra de lo indicado, considere un sistema definido como:
y(t) = \sin[x(t)]
Para revisar si es invariante en el tiempo, se debe determinar si sus propiedades de mantienen para cualquier entrada ante cualquier desplazamiento t0.
y_1 (t) = \sin[x(t - t_0)] y_2(t) = y(t - t_0)
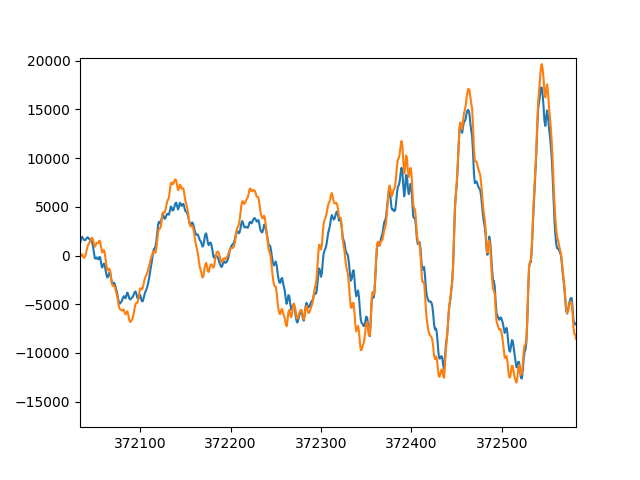
Suponga x1(t)= e(-t)u(t) la señal bajo prueba, siendo x2(t)= e(-(t-t0))u(t-t0) la entrada x1(t) desplazada en t0. Haciendo t0=1, se puede observar en la gráfica si al aplicar el retraso antes o después del sistema tienen resultados iguales.
y_1 (t) = y_2(t)
En éste caso se observa que la señal de salida se mantiene invariante en su forma y desplazada en sincronía con la señal de entrada. Por lo que el sistema es INVARIANTE en el tiempo.
La gráfica y el siguiente resultado se realizaron con el algoritmo desarrollado a partir del tema anterior sobre sistemas lineales. El algoritmo se adjunta al final.
Considere el sistema que tiene escalamiento en el tiempo.:
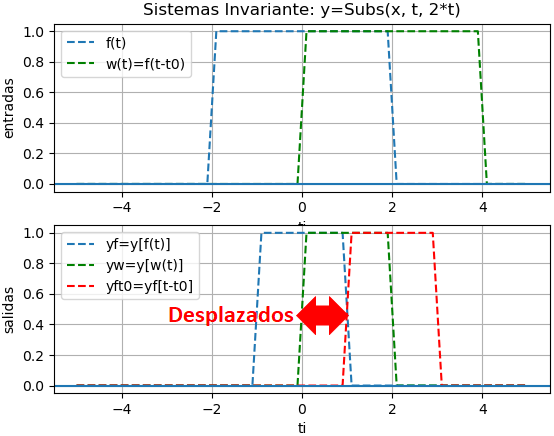
y(t) = x(2t)
y(t) es una versión comprimida en tiempo de x(t) en un factor de 2.
Los desplazamientos en el tiempo de la señal de entrada al pasar por el sistema también se «comprimen» por un factor de 2.
Haciendo f(t) = μ(t+2)-μ(t-2) una señal rectangular centrada en el origen con color azul en la gráfica.
Si la entrada w(t) = f(t-2)= μ(t)-μ(t-4) es una real rectangular desplazada en 2 (en color verde), su resultado en la salida se encuentra centrado en 1.
Al desplazar el resultado de la señal de entrada en su forma original en azul, por t0 se obtiene la señal de salida en color rojo. Claramente los resultados de aplicar un retraso antes o después del sistema son diferentes.
Por lo que, por ésta razón el sistema NO es invariante en el tiempo.
Siguiendo las indicaciones en el problema presentado, donde T se conoce como el «operador lineal«. El sistema tiene una relación de entrada-salida dada por:
y(t) = T{x(t)} = x(2t)
y t0 es un desplazamiento en el tiempo.
Sea y2(t) la respuesta a x2(t) = x(t-t0) entonces:
y2(t) = T{x2(t)} = x2(2t) = x(2t-t0)
Si se desplaza el resultado de la señal de salida sin desplazar se tiene:
y(t-t0) = x(2(t-t0)) = x(2t-2t0))
y(t-t0) ≠ y2(t)
por lo que el sistema no es invariante en el tiempo.
El sistema x(2t) se conoce como compresor, pues crea una secuencia de salida cada 2 valores de la secuencia de entrada.
Para el sistema dado, al depender su magnitud de la variable t, la salida tiende a crecer con el tiempo, por lo que se puede intuir que el sistema es inestable.
Observando los resultados y la gráfica se tiene que el sistema NO es invariante en el tiempo.
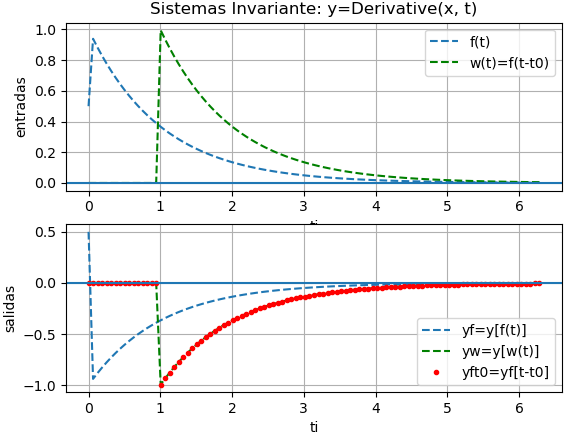
Ejemplo 4. Sistema deriva la entrada
Referencia: Lathi 1.11 p103
Determine la invariabilidad de tiempo del siguiente sistema
y(t) = \frac{d}{dt} x(t) ,
Suponga x1(t)= e(-t)u(t), semejante a lo usado en el ejercicio 1.
El desarrollo con el algoritmo muestra que el sistema resulta invariante en el tiempo.
En este caso, dado que la señal de entrada tiene una función escalón, sympy no presenta inconvenientes en realizar la derivada. Sin embargo, la operacion de conversión con Lambdify será necesario añadir la equivalencia de DiracDelta en numpy. Por lo que la instrucción de Lambdify se le añade el parámetro para considerar los modulos equivalentes.
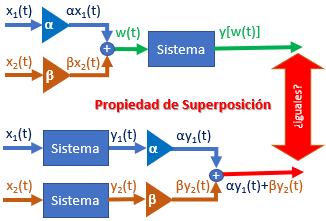
En un sistema lineal cumple con el principio de superposición que se compone de la propiedad de aditividad y de la escalabilidad.
La superposición puede ser un resultado deseado, por ejemplo en un sistema de audio que no añada «distorsiones» a lo que ingresa por un micrófono y se reproduce en los parlantes.
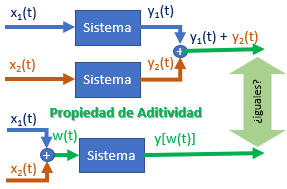
Un sistema lineal cumple la propiedad de aditividad, si la respuesta a una suma de señales en la entrada es igual a la suma de las salidas de las señales anteriores.
x_1(t) + x_2(t) \rightarrow y_1(t) + y_2(t)
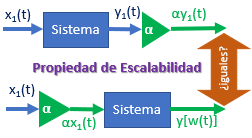
La propiedad de escalabilidad u homogeneidad muestra una relación de «amplificación» o «atenuación» representada por una constante.
Para los ejemplos, las constantes a usar son α y β que podrían ser reales o complejas.
\alpha x_1(t) \rightarrow \alpha y_1(t)
La propiedad de escalabilidad implica que una amplificación o atenuación puede ser aplicada antes o después del sistema, el resultado debería ser semejante.
La propiedad de superposición se plantea como una combinación de las propiedades anteriores:
Ejemplo 1. Un micrófono inductivo, sistema que deriva x(t)
Referencia: Lathi 1.11 b p103.
Para el sistema dado, determine si cumple la propiedad de aditividad y escalabilidad para revisar si es un sistema lineal:
y(t) = \frac{\delta}{\delta t}x(t)
La salida del sistema es solo la derivada de la señal de entrada. Al sumar dos entradas diferentes antes del sistema, representada como w(t), se produce el mismo resultado que la suma de las salidas del sistema para las señales de entrada individuales.
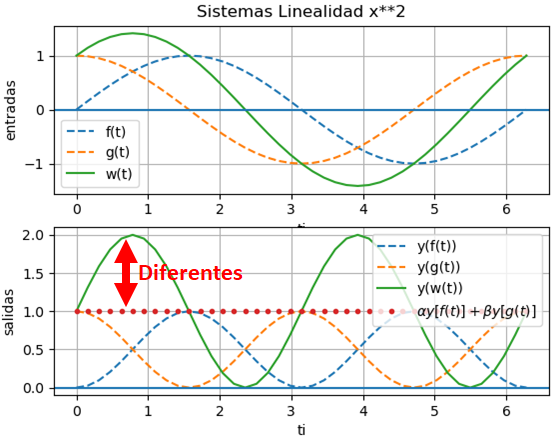
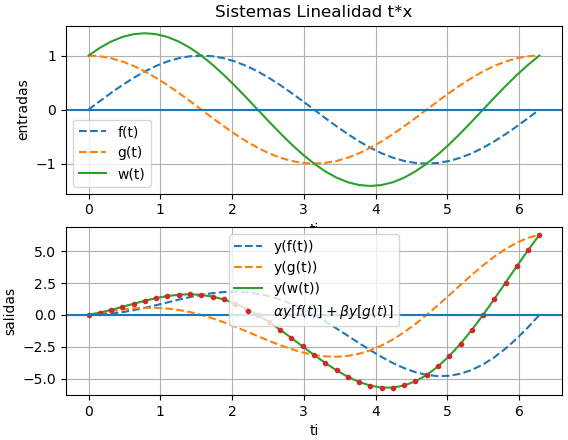
Suponiendo como entradas las señales f(t) = sin(t), graficada en azul, g(t) = cos(t) en color naranja, al aplicarse cada una al sistema, se obtienen las gráficas de salida usando los mismos colores para facilidad de comparación.
Para el análisis, se añade una entrada adicional w(t) = α f(t) + β g(t) que en la gráfica es de color verde para entrada y salida.
Se obtiene la expresión para el sistema α y[f(t)] + β y[g(t)] (color rojo) y se observa si son iguales con y[w(t)], de ser iguales, el sistema es lineal.
El desarrollo analítico se encuentra en el libro guía en la referencia, por lo que se adjunta la parte algorítmica para la gráfica con Python, y se obtienen también las expresiones para los resultados correspondientes con Sympy:
Un ejemplo de aplicación para un sistema que deriva una entrada es un micrófono dinámico o de bobina, usado como preferencia por sus propiedades en locución de radio.
Sympy facilita generar las expresiones de las señales de entrada al pasar por el sistema. De ser necesario, revise los conceptos para Sympy en el curso de Métodos Numéricos: Sympy – Fórmulas y funciones simbólicas
En Sympy se puede derivar una expresión usando sym.diff(). Sin embargo para un sistema que aplica derivadas, las expresiones de salida se generan sin aplicar la derivada pues primero se sustituye la variable x con la expresión de la entrada y luego se aplica sym.Derivative(x,t). Para que se ejecute la derivada se tiene la instrucción doit().
En caso que la señal de entrada sea una expresión mas compleja que la de los ejemplos, se recomienda usar la instrucción a la expresión .expand(). expand() genera términos más simples de la expresión que facilitan el análisis por algoritmos con Python.
# Sistema Lineal prueba# Revisa propiedad de aditividad y escalabilidad# Lathi ej1.11 p103import numpy as np
import sympy as sym
import matplotlib.pyplot as plt
# INGRESO
t = sym.Symbol('t', real=True)
x = sym.Symbol('x', real=True)
# señales de entrada
f = sym.sin(t)
g = sym.cos(t)
alpha = 1
beta = 1
# sistema, aplica a entrada# expresión sin evaluar
y = sym.diff(x,t, evaluate=False)
# intervalo de t[a,b] para graficar
a = 0
b = 2*np.pi
muestras = 41
# PROCEDIMIENTO# señales suma de entradas
w = alpha*f + beta*g
# Sistema sobre señal de entrada# se evalua la expresión con doit()
yf = y.subs(x,f).doit()
yg = y.subs(x,g).doit()
yw = y.subs(x,w).doit()
yfg = alpha*yf+ beta*yg
# Para gráfica
ti = np.linspace(a,b,muestras)
# señales de entrada
ft = sym.lambdify(t,f)
gt = sym.lambdify(t,g)
wt = sym.lambdify(t,w)
# señales de salida
yft = sym.lambdify(t,yf)
ygt = sym.lambdify(t,yg)
ywt = sym.lambdify(t,yw)
yfgt = sym.lambdify(t,yfg)
# evalua entradas ti
fi = ft(ti)
gi = gt(ti)
wi = wt(ti)
# evalua salidas ti
yfi = yft(ti)
ygi = ygt(ti)
ywi = ywt(ti)
yfgi = yfgt(ti)
# SALIDAprint('yf:')
sym.pprint(yf)
print('yg:')
sym.pprint(yg)
print('yw:')
sym.pprint(yw)
print('yfg:')
sym.pprint(yfg)
# grafica
plt.subplot(211) # entradas
plt.plot(ti,fi,'--', label='f(t)')
plt.plot(ti,gi,'--', label='g(t)')
plt.plot(ti,wi, label='w(t)')
plt.axhline(0)
plt.xlabel('ti')
plt.ylabel('entradas')
untitulo = 'Sistemas Linealidad ' + str(y)
plt.title(untitulo)
plt.legend()
plt.grid()
plt.subplot(212) # salidas
plt.plot(ti,yfi,'--', label='y(f(t))')
plt.plot(ti,ygi,'--', label='y(g(t))')
plt.plot(ti,ywi, label='y(w(t))')
etqLatex = r'$ \alpha y[f(t)]+\beta y[g(t)] $'
plt.plot(ti,yfgi,'.',
label=etqLatex)
plt.axhline(0)
plt.xlabel('ti')
plt.ylabel('salidas')
plt.legend()
plt.grid()
plt.show()
Los sistemas se usan para procesar una señal con el objetivo de modificarla, por ejemplo sumar o restar información adicional.
Ejemplo
Un sistema amplificador de audio, tiene como señal de entrada el sonido captado por un micrófono y como salida el sonido amplificado en los parlantes.
Otro ejemplo de sistema se observa en los efectos que se aplican a una señal de audio de un piano, y por medio de un sistema se modifica la señal para que suene como guitarra.
Para otros ejemplos revisar videos sobre: wah pedals para efectos de guitarra, sintetizadores analógicos, etc.
Representación de sistemas
Un sistema para análisis y diseño es una representación de un proceso físico, que relaciona las señales de entrada x(t) y las señales de salida y(t) obtenidas como respuesta.
La representación puede ser de tipo matemática o en diagramas de bloques con flechas. El sentido de las flechas indican la entrada o salida.
y(t) = h(t) * x(t)
h(t) = k
y(t) = k x(t)
Entradas y salidas de un sistema
Los sistemas pueden tener.
– Una entrada y una salida (SISO – Single Input, Single output)
– Varias entradas, varias salidas (MIMO – Multiple Input, Multiple output)
Durante el curso para simplificar el análisis, se usan las representaciones de una entrada y una salida (SISO), Ejemplo: audio monofónico o de un solo canal.