Referencia: Lathi 4.5 p386, Oppenheim 9.8.2 p708,

Representaciones en diagramas de bloques para los sistemas LTI causales descritos por ecuaciones diferenciales y en el dominio s por funciones racionales H(s).
Los diagramas de bloques se pueden realizar con software abierto como Xcos de SciLab.
1. H(s) Diagrama de bloques y sistema de 1er orden
Referencia: Oppenheim ejemplo 9.28 p708, Lathi ejemplo 4.22a p392
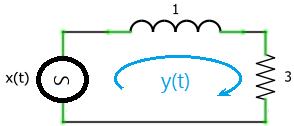
Considere un sistema LTI causal, circuito RL con una fuente de energía AC mostrados en la figura. La ecuación diferencial que lo representa es:
\frac{d}{d t} y(t) + 3y(t) = x(t)En el dominio s se escribe como:
sY(s) + 3Y(s) = X(s) sY(s) = X(s) -3Y(s) Y(s) = \frac{1}{s}[X(s) - 3Y(s)]Al despejar Y(s) se presenta un bloque integrador (1/s) de la señal de entrada X(s) con retroalimentación de salida Y(s). El daiagrama de bloques se muestra como:
Se agrupando Y(s) para obtener los polinomios de s
sY(s) + 3Y(s) = X(s) (s+3) Y(s) = X(s)También e puede expresar la relación como una función de transferencia H(s):
H(s)= \frac{Y(s)}{X(s)} =\frac{1}{s+3}Otra forma de expresar H(s), al multiplicar el numerador y denominador por 1/s
Muestra que se puede expresar también como dos bloques H1(s) = 1/s y H2(s) = 3. Los bloques interconectados en el diagrama muestran la expresión como:
\frac{Y(s)}{X(s)} = H(s) = \frac{H_1(s)}{1+H_1(s)H_2(s)}2. H(s) Diagrama de bloques de sistema de 2do orden como combinación de 1er orden
Referencia: Oppenheim ejemplo 9.30 p711, Lathi 4.5-3 p393
Considere el sistema causal de segundo orden con la función del sistema:
H(s) = \frac{1}{(s+1)(s+2)} = \frac{1}{s^2 + 3s +2}Para la ecuación diferencial se usa la forma,
H(s) = \frac{Y(s)}{X(s)} = \frac{1}{s^2 + 3s +2} (s^2 + 3s + 2)Y(s) = X(s) s^2 Y(s) + 3sY(s) + 2Y(s) = X(s)la entrada x(t) y la salida y(t) para este sistema satisfacen la ecuación diferencial:
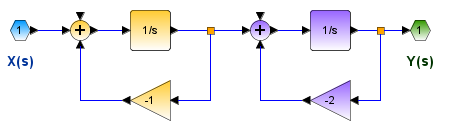
\frac{d^2}{d t^2}y(t) + 3 \frac{d}{dt} y(t) + 2 y(t) = x(t)El diagrama de bloques se obtiene reordenando la ecuación de s para despejar el término de mayor grado.
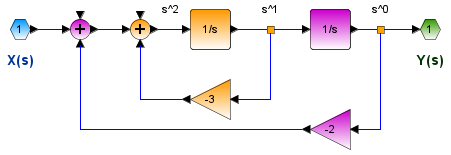
s^2 Y(s) + 3sY(s) + 2Y(s) = X(s) s^2Y(s) = X(s) - 3sY(s) - 2Y(s) Y(s) = \frac{1}{s^2} \Big[ X(s) - 3sY(s) - 2Y(s)\Big]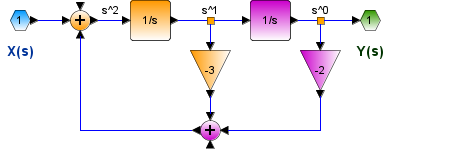
reordenando los bloques también se obtiene:
3. Reordena H(s) con fracciones parciales
Usando H(s) de la primera expresión del enunciado, se usa fracciones parciales para reordenar la expresión como:
H(s) = \frac{1}{(s+1)(s+2)} = \frac{k_1}{s+1} + \frac{k_2}{s+2}Para encontrar las constantes k1 y k2, el numerador de la expresión de la derecha debe ser igual a 1 , desarrollando la expresión para el numerador se tiene que:
k_1s + 2k_1 + k_2s + k_2 = (k_1 + k_2)s + (2k_1 +k_2)igualando al numerador de la parte izquierda que es 1, o expresado como 0s+1, el resultado debería ser:
(k_1 + k_2)s + (2k_1 +k_2) = 0s + 1Se crean las ecuaciones para cada coeficiente de s en el numerador:
k_1 + k_2 = 0 2k_1 + k_2 = 1con lo que,
k_1 = 1 , k_2 = -1al reemplazar,
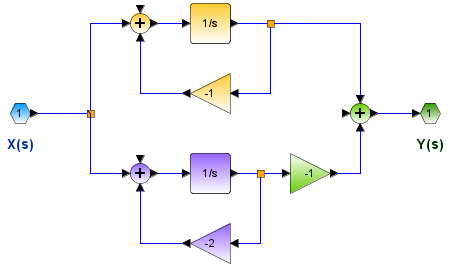
H(s) = \frac{1}{s+1} -\frac{1}{s+2}El resultado permite realizar un diagrama equivalente en paralelo de dos sistemas mas simples. La suma de dos componentes de primer orden es un diagrama con bloques de primer orden en paralelo.
En el caso de la expresión racional inicial, se observa que se puede escribir como la multiplicación de dos sistemas de primer orden.
H(s) = \frac{1}{(s+1)(s+2)} = \Big[\frac{1}{s+1}\Big]\Big[\frac{1}{s+2}\Big]que se representa como bloques en serie o cascada de dos sistemas de primer orden.
que por cierto, también es la convolución de dos sistemas en serie.
Fracciones parciales con Sympy-Python
También es posible realizar las fracciones parciales con Sympy ingresando toda la expresión de H(s) de la forma:
Hs = 1/((s+1)*(s+2))y usando sym.apart() se obtienen las fracciones parciales de la expresión,
H(s):
1
---------------
(s + 1)*(s + 2)
H(s) en fracciones parciales:
1 1
- ----- + -----
s + 2 s + 1
>>> Algoritmo en Sympy-Python:
# Fracciones parciales con Laplace
# Ps es numerador, Qs es denominador
# Oppenheim 9.30 p711
import sympy as sym
# INGRESO
s = sym.Symbol('s')
Ps = 1
Qs = (s+1)*(s+2)
Hs = Ps/Qs
# PROCEDIMIENTO
# fracciones parciales de s
Hs_parcial = sym.apart(Hs,s)
# SALIDA
print('H(s):')
sym.pprint(Hs)
print('\n H(s) en fracciones parciales:')
sym.pprint(Hs_parcial)
La instrucción sym.apart() se aplica sobre expresiones tipo polinomio, se debe considerar el caso cuando H(s) es solo un componente constante o tiene un desplazamiento de tiempo representado por sym.exp(). El asunto se trata en mayor detalle en página sobre fracciones parciales de la unidad 4.
4. H(s) Diagrama de bloques 2do orden, componentes en serie o paralelo
Referencia: Oppenheim ejemplo 9.31 p712, Lathi Ejemplo 4.23 p395
Considere la función del sistema
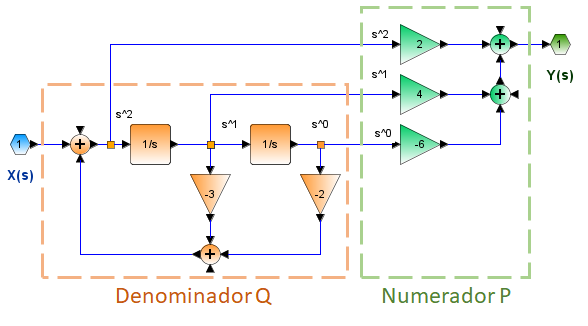
H(s) = \frac{2s^2 + 4s - 6}{s^2 + 3s + 2}se puede reescribir como:
H(s) = \Big[\frac{1}{s^2 + 3s + 2} \Big] \Big[ 2s^2 + 4s - 6 \Big]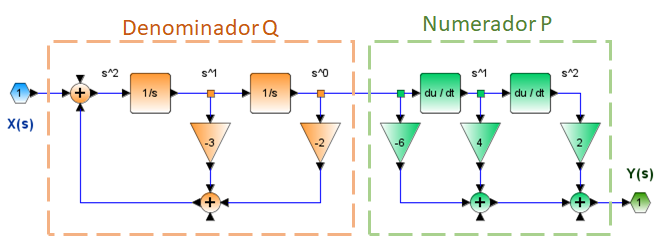
Para los componentes del numerador P pueden tomar respuestas del bloque denominador Q simplificando el diagrama :
Ejemplo 4.1 H(s) con fracciones parciales
Usando fracciones parciales, se puede convertir H(s) en componentes mas simples en paralelo
H(s) = 2 + \frac{6}{s+2} - \frac{8}{s+1}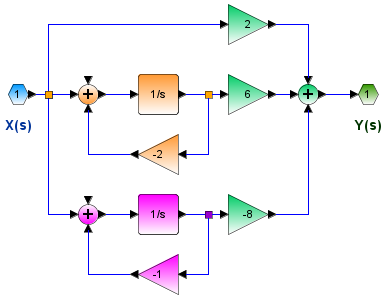
Usando las raíces del numerador P se escribe H(s) de la forma en que se obtiene un sistema en serie o cascada,
H(s) = \Big[ 2\Big] \Big[\frac{s-1}{s+2} \Big] \Big[\frac{s+3}{s+1} \Big]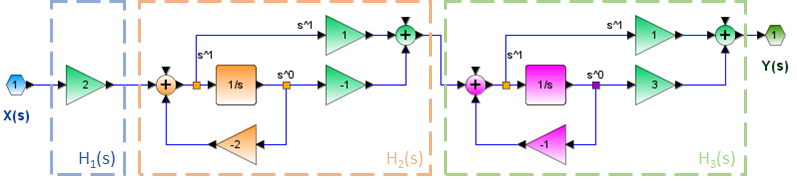
Ejemplo 4.2 Fracciones parciales usando Sympy-Python
H(s):
2
2*s + 4*s - 6
--------------
2
s + 3*s + 2
H(s) en fracciones parciales:
6 8
2 + ----- - -----
s + 2 s + 1
H(s) como factores:
2*(s - 1)*(s + 3)
-----------------
(s + 1)*(s + 2)
H(s) simplificada:
/ 2 \
2*\s + 2*s - 3/
----------------
2
s + 3*s + 2 Algoritmo en Python
# Fracciones parciales con Laplace, factores
# Ps es numerador, Qs es denominador
# Oppenheim 9.30 p711
import sympy as sym
# INGRESO
s = sym.Symbol('s')
Ps = 2*s**2+4*s-6
Qs = s**2+3*s+2
Hs = Ps/Qs
# PROCEDIMIENTO
# fracciones parciales de s
Hs_parcial = sym.apart(Hs,s)
# expresion con factores de s
Hs_factor = sym.factor(Hs_parcial,s)
# simplificar a la forma inicial
Hs_simple = sym.simplify(Hs_parcial)
# SALIDA
print('H(s):')
sym.pprint(Hs)
print('\n H(s) en fracciones parciales:')
sym.pprint(Hs_parcial)
print('\n H(s) como factores:')
sym.pprint(Hs_factor)
print('\n H(s) simplificada:')
sym.pprint(Hs_simple)
La instrucción sym.factor() aplica sobre expresiones simples. En caso de disponer la expresión como polinómica, puede usar la conversión con Hs_parcial.as_expr(s).
Ejemplo 4.3 Ecuación diferencial de H(s)
H(s) = \frac{Y(s)}{X(s)} = \frac{2s^2 + 4s - 6}{s^2 + 3s + 2}Se reordena la expresión,
(s^2 + 3s + 2)Y(s) = (2s^2 + 4s - 6) X(s) s^2 Y(s) +3s Y(s) + 2Y(s) = 2 s^2 X(s) + 4s X(s) - 6X(s)Si considera la forma de la ecuación diferencial, también es la de un circuito eléctrico RLC. El primer término Y(t) sería el del inductor L, pero expresado como primera derivada. El segundo término es el resistor y el tercer término es del capacitor. Lo que se puede apreciar dividiendo toda la ecuación para 's'.
sY(s) +3 Y(s) + 2\frac{1}{s}Y(s) = 2 s X(s) + 4 X(s) - 6\frac{1}{s}X(s)que es el circuito de los primeros ejemplos de Sistema – Modelo entrada-salida.
Sustituyendo las s de Laplace por derivadas y Y(s) por y(t) en la expresión de 2do orden,
\frac{\delta ^2}{\delta t^2} y(t) + 3\frac{\delta}{\delta t} y(t) + 2y(t) = 2\frac{\delta ^2}{\delta t^2} x(t) + 4\frac{\delta}{\delta t} x(t) - 6x(t)En las próximas secciones se analiza la estabilidad del sistema para las señales de salida usando polos y ceros.