1. Autocovarianza AM
Referencia: León García Ejemplo 9.9 p495, Gubner Ej10.35 p496
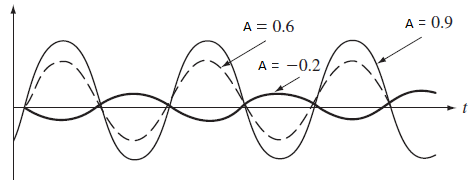
Sea X(t) = A cos(2πt), donde A es una variable aleatoria, con un comportamiento semejante a la figura.
Encontrar el valor esperado , la autocorrelación y autocovarianza de de X(t).
El valor esperado se calcula a continuación, note que la media varia respecto a t y que el valor es cero para valores de t donde cos(2πt) =0.
E[X(t)] = E[A cos(2\pi t)] E[X(t)] = E[A] cos(2\pi t)La autocorrelación es:
R_X(t_1,t_2) = E[A cos(2\pi t_1) A cos(2\pi t_2)] = E[A^{2} cos(2\pi t_1) cos(2\pi t_2)] = E[A^{2}] cos(2\pi t_1) cos(2\pi t_2)usando:
2 cos(x)cos(y) = cos(x-y) + cos(x+y) cos(x)cos(y) = \frac{ cos(x-y) + cos(x + y)}{2}se reemplaza:
= E[A^{2}] \frac{1}{2}[cos(2\pi t_1 - 2\pi t_2) + cos(2\pi t_1 + 2\pi t_2)] R_X(t_1,t_2) = E[A^{2}] \frac{[cos(2\pi (t_1 - t_2)) + cos(2\pi (t_1 + t_2))]}{2}se observa que el valor de autocorrelación depende de las diferencias de tiempo t1 y t2.
La autocovarianza es:
Cov_X(t_1,t_2) = R_X(t_1,t_2) - E[X(t_1)]E[X(t_2)] = E[A^{2}] cos(2\pi t_1) cos(2\pi t_2) - E[A] cos(2\pi t_1)E[A] cos(2\pi t_2) = E[A^{2}] cos(2\pi t_1) cos(2\pi t_2) - E[A]^2 cos(2\pi t_1)cos(2\pi t_2) = (E[A^{2}] - E[A]^2) cos(2\pi t_1)cos(2\pi t_2) = Var[A] cos(2\pi t_1)cos(2\pi t_2)con el mismo procedimiento de cos(x)cos(y):
Cov_X(t_1,t_2) = Var[A] \frac{[cos(2\pi (t_1 - t_2)) + cos(2\pi (t_1 + t_2))]}{2}2. Autocovarianza PM
Referencia: León García Ejemplo 9.10 p495, Gubner Ejemplo 10.8 p389, Gubner Ejemplo 10.17 p396
Sea X(t) = cos(ω t + Φ), donde Φ es uniforme en el intervalo (-π,π) Encontrar la autocovarianza de X(t).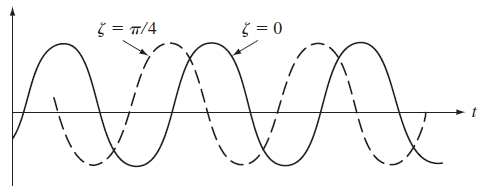
la variable aleatoria Φ tiene distribución uniforme en el intervalo, por lo que la función fΦ(φ) es constante = 1/[π - (-π)] = 1/2π.
Recordamos que:
E[g(x)] = \int_{-\infty}^{\infty} g(x) f(x) dxMedia (León-García 4.15 p158):
m_X(t) = E[cos(\omega t + \Phi)] = = \int_{-\pi}^{\pi} cos(\omega t + \Phi) \frac{1}{2\pi} d\Phi = \left. \frac{-1}{2\pi} (sin (\omega t + \Phi)) \right|_{-\pi}^{\pi} = \frac{-1}{2\pi} [sin (\omega t + (-\pi)) - sin (\omega t + \pi)] = 0Autocovarianza
dado que el valor esperado es cero, la autocovarianza es igual a la autocorrelación
C_{X} (t_1,t_2) = R_X (t_1,t_2) - E[X(t_1,t_2)] = R_X (t_1,t_2) = E[cos(\omega t_1 + \Phi) cos(\omega t_2 +\Phi)]Recordando que:
E[g(x)] = \int_{-\infty}^{\infty} g(x) f(x) dx cos(x) cos(y) = \frac{cos(x-y) + cos(x+y) }{2}se tiene que:
= \int_{-\pi}^{\pi} [cos(\omega t_1 + \Phi) cos(\omega t_2 +\Phi)] \frac{1}{2\pi} d\Phi = \int_{-\pi}^{\pi} \frac{cos(\omega (t_1 - t_2))+cos(\omega (t_1 + t_2)+ 2\Phi)}{2} \frac{1}{2\pi} d\Phi = \int_{-\pi}^{\pi} \frac{cos(\omega (t_1 - t_2))}{2} \frac{1}{2\pi} d\Phi + \int_{-\pi}^{\pi} \frac{cos(\omega (t_1 + t_2 )+ 2\Phi)}{2} \frac{1}{2\pi} d\PhiEl primer integral, el coseno no depende de Φ, mientras que el segundo integral es semejante al intergral de la media y cuyo resultado es cero.
= \left. \frac{cos(\omega (t_1 - t_2))}{2} \frac{\Phi}{2\pi} \right|_{-\pi}^{\pi} + 0 C_{X} (t_1,t_2) = R_X (t_1,t_2) = = \frac{1}{2} cos(\omega (t_1 - t_2))