En valor práctico 2.028 m usando flexómetro, a menos que use medidor laser con precisión 10-6 usará más dígitos con un tanque de 6 metros de altura ganará una precisión de una gota de agua para usar en duchas o regar el césped .
c) El orden de convergencia del error observando las tres primeras iteraciones es cuadrático
Tarea: Realizar los cálculos con Python, luego aplique otro método. Añada sus observaciones y conclusiones.
1ra Evaluación I Término 2018-2019. 26/junio/2018. MATG1013
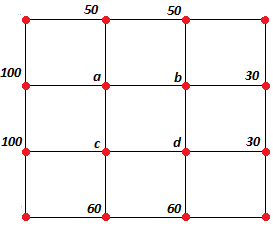
Tema 3. (25 puntos). La temperatura en los nodos de la malla de una placa se puede calcular con el promedio de las temperaturas de los 4 nodos vecinos de la izquierda, derecha, arriba y abajo.
Una placa cuadrada de 3 m de lado tiene la temperatura en los nodos de los bordes como se indica en la figura,
a) Plantee el sistema de ecuaciones y resuelva con eliminación de Gauss, encontrar a, b, c, d.
b) Encuentre la matriz T de Jacobi y comente sobre la convergencia
c) Con X[0]=[a=60, b=40, c=70, d=50], realice 3 iteraciones, estime el error, comente.
d) Con la tercera iteración calcule el residuo y encuentre una cota del error absoluto y error relativo
Rúbrica: Literal a (5 puntos), literal b (5 puntos), literal c (10 puntos), literal d (5 puntos).
Referencia: Ejercicio 12.39 p339 Steven C. Chapra. Numerical Methods 7th Edition.
Observación: la matriz A ya es diagonal dominante, no requiere pivotear por filas. Se aumentó el punto decimal a los valores de la matriz A y el vector B para que sean considerados como números reales.
El número de condición es: np.linalg.cond(A) = 3.0
que es cercano a 1 en un orden de magnitud, por lo que la solución matricial es "estable" y los cambios en los coeficientes afectan proporcionalmente a los resultados. Se puede aplicar métodos iterativos sin mayores inconvenientes.
b y c) método de Jacobi para sistemas de ecuaciones, con vector inicial
X(0) = [[60.0],
[40],
[70],
[50]]
reemplazando los valores iniciales en cada ecuación sin cambios.
1ra Evaluación I Término 2018-2019. 26/Junio/2018. MATG1013
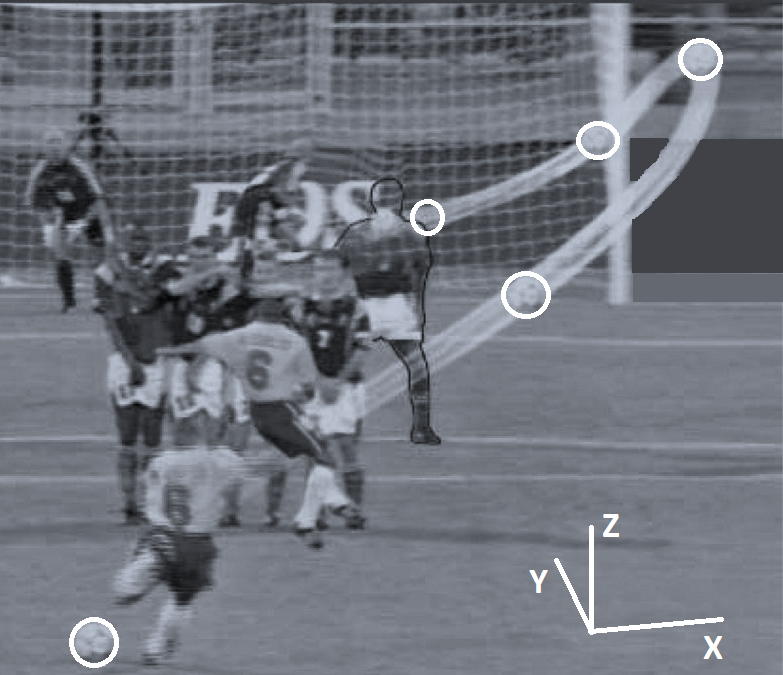
Tema 4. “El gol que desafió a la física”. El 3 de junio de 1997, durante el partido de Brasil vs Francia, el brasileño Roberto Carlos ubicó la pelota a 35 metros del arco del Francés Fabien Barthez para rematar un tiro libre. Retrocedió 18 pasos, y luego sacó un zurdazo brutal, mágico, irreal, de ficción, para vencer en un segundo y fracción el arco del portero que al año siguiente se coronaría campeón del mundo.
Se obtuvieron los siguientes datos de videos y fotografías del suceso.
t
0.00
0.15
0.30
0.45
0.60
0.75
0.90
1.05
1.20
x(t)
0.00
0.50
1.00
1.50
1.80
2.00
1.90
1.10
0.30
y(t)
0.00
4.44
8.88
13.31
17.75
22.19
26.63
31.06
35.50
z(t)
0.00
0.81
1.40
1.77
1.91
1.84
1.55
1.03
0.30
Para el estudio de la trayectoria del balón se requieren las funciones que la describen en los ejes cartesianos.
a) Use interpolación con t = 0, 0.3, 0.6, 0.9 aproximar la trayectoria z(t) y encuentre t donde la altura es máxima.
b) Determine la altura ‘z’ del balón cuando cruzó la barrera. La barrera se ubica a y = 9 m de la posición inicial del balón.
c) Determine la desviación máxima (dx/dt=0) que hace que el gol sea considerado como “un desafío a la física”.
Rúbrica: literal a (10 puntos), literal b (7 puntos), literal c (8 puntos)
ti = [0.00, 0.15, 0.30, 0.45, 0.60, 0.75, 0.90, 1.05, 1.20]
xi = [0.00, 0.50, 1.00, 1.50, 1.80, 2.00, 1.90, 1.10, 0.30]
yi = [0.00, 4.44, 8.88,13.31,17.75,22.19,26.63,31.06,35.50]
zi = [0.00, 0.81, 1.40, 1.77, 1.91, 1.84, 1.55, 1.03, 0.30]
Observe que, un gol simplificado con física básica es un tiro parabólico cuya trayectoria se compone de movimientos en los ejes, Y y Z. Sin embargo, lo "imposible" del gol mostrado es añadir el movimiento en X. (Referencia de la imagen en el enunciado)
El movimiento de "profundidad" o dirección hacia el arco y(t) es semejante a un polinomio de primer grado, y el movimiento de "altura" z(t) es un polinomio de segundo grado. El movimiento "imposible" en el eje X, podría ser descrito por un polinomio de segundo o mayor grado.
a) Encontrar t para altura máxima, que se encuentra al igualar la derivada dz/dt a cero. Para interpolar el polinomio z(t), de segundo grado, se puede usar tres puntos de los sugeridos: 0, 0.3 y 0.6, que además son equidistantes en t (facilita usar cualquier método de interpolación).
Por ejemplo, con diferencias finitas avanzadas:
t
z(t)
d1
d2
d3
0.00
0.00
1.40
-0.89
0.30
1.40
0.51
0.60
1.91
z(t) = 0 + 1.40\frac{(t-0)}{1!(0.3)} - 0.89 \frac{(t-0)(t-0.3)}{2!(0.3)^2} = 0 + 4.66 t - 4.94(t^2-0.3t) = 4.66 t + 1.48 t - 4.94 t^2 z(t) = 6.42 t - 4.94 t^2
para encontrar el valor máximo se encuentra \frac{dz}{dt} = 0
\frac{dz}{dt} = 6.42 - 2(4.94) t 6.42 - 2(4.94) t = 0 t = \frac{6.42}{2(4.94)} t = 0.649
Observe que el resultado tiene sentido, pues según la tabla, el máximo debería estar entre 0.60 y 0.75
b) El cruce por la "barrera", corresponde al desplazamiento del balón en el eje Y a 9 metros: y(t) = 9.
El polinomio modelo de primer grado usa dos puntos para la interpolación, de los sugeridos se escogen dos, por ejemplo: 0.0 y 0.3.
29.6 t = 9
t = 0.30
z(0.30) = 1.40
(de la tabla de datos)
cuya respuesta con solo dos dígitos decimales es coherente, al estar cercano el valor a una distancia y=8.88 o aproximado a 9.
La respuesta puede ser mejorada usando más digitos significativos en las operaciones.
c) La desviación máxima en eje X.
Determine un polinomio para la trayectoria en el eje X y obtenga el máximo igualando la derivada del polinomio x(t) a cero.
Por simplicidad, se usa un polinomio de segundo grado, alrededor de los valores máximos en el eje X
lo que es coherente con la tabla para el eje x, pues el máximo registrado es 2, y el próximo valor es menor, la curva será decreciente.
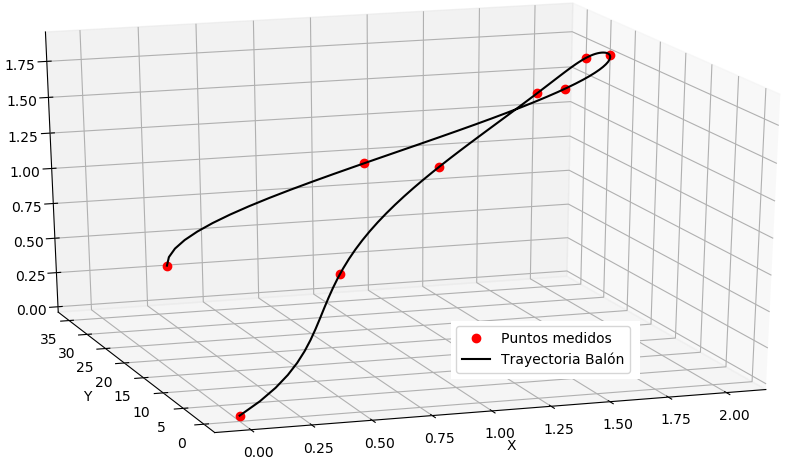
Desarrollo extra para observar y verificar resultados:
Usando los puntos y un graficador 3D se puede observar la trayectoria:
Tarea: Realice el ejercicio usando los algoritmos en Python, muestre los polinomios obtenidos y compare.
Nota: La gráfica 3D presentada usa interpolación de Lagrange con todos los puntos. Realice las observaciones y recomendaciones necesarias y presente su propuesta como tarea.
3ra Evaluación II Término 2017-2018. Febrero 20, 2018. MATG1013
Tema 2. El caballo llamado Thunder Gulch ganó el derby de Kentucky de 1995, con un tiempo de 2 min 1 \frac{1}{5} s en la carrera de 1 \frac{1}{4} millas.
Los tiempos en los postes que marcan el cuarto de milla, la mitad de la milla y la milla fueron respectivamente 22 \frac{2}{5} s, 45 \frac{4}{5} s, 1 min con 1 \frac{1}{5} s.
a) Use los valores anteriores junto con el tiempo de arranque y construya un trazador cúbico natural.
b) Use el trazador para predecir el tiempo en el poste de tres cuartos de milla y compare el resultado con el tiempo real de 1 min con 10 \frac{1}{5} s.
c) Usando el trazador y las fórmulas de diferencias finitas, aproxime la velocidad y la aceleración del caballo en todos los postes.
Nota: Obseve que las medidas se encuentran en fracciones de unidad.