animación: [ EDO Taylor 3t ] [ Runge Kutta dy/dx ] [ Sistemas EDO con RK ]
Solo para fines didácticos, y como complemento para los ejercicios presentados en la unidad para la solución de Ecuaciones Diferenciales Ordinarias, se presentan las instrucciones para las animaciones usadas en la presentación de los conceptos y ejercicios. Los algoritmos para animación NO son necesarios para realizar los ejercicios, que requieren una parte analítica con al menos tres iteraciones en papel y lápiz. Se lo adjunta como una herramienta didáctica de asistencia para las clases.
animación: [ EDO Taylor 3t ] [ Runge Kutta dy/dx ] [ Sistemas EDO con RK ]
..
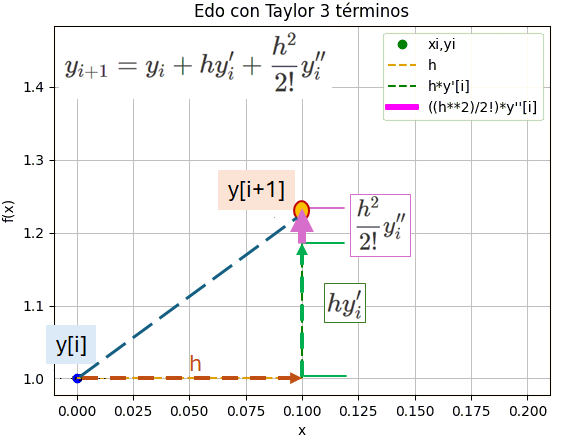
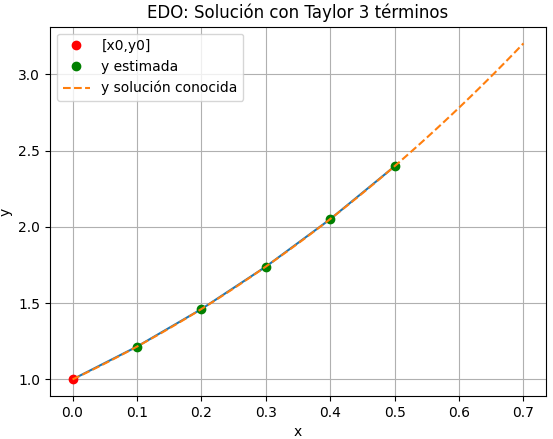
EDO con Taylor de 3 términos
Tabla de resultados:
EDO con Taylor 3 términos
[xi, yi, d1yi, d2yi, término 1, término 2 ]
[[0. 1. 0. 0. 0. 0. ]
[0.1 1.215 2. 3. 0.2 0.015 ]
[0.2 1.461025 2.305 3.105 0.2305 0.015525 ]
[0.3 1.73923262 2.621025 3.221025 0.2621025 0.01610513]
[0.4 2.05090205 2.94923262 3.34923262 0.29492326 0.01674616]
[0.5 2.39744677 3.29090205 3.49090205 0.32909021 0.01745451]]
>>>
Instrucciones en Python
# EDO. Método de Taylor con3 términos
# estima solucion para muestras separadas h en eje x
# valores iniciales x0,y0
import numpy as np
def edo_taylor3t(d1y,d2y,x0,y0,h,muestras, vertabla=False, precision=6):
''' solucion a EDO usando tres términos de Taylor,
x0,y0 son valores iniciales, h es el tamaño de paso,
muestras es la cantidad de puntos a calcular.
'''
tamano = muestras + 1
tabla = np.zeros(shape=(tamano,6),dtype=float)
# incluye el punto [x0,y0]
tabla[0] = [x0,y0,0,0,0,0]
x = x0
y = y0
for i in range(1,tamano,1):
d1yi = d1y(x,y)
d2yi = d2y(x,y)
y = y + h*d1yi + ((h**2)/2)*d2yi
x = x + h
term1 = h*d1yi
term2 = ((h**2)/2)*d2yi
tabla[i] = [x,y,d1yi,d2yi,term1,term2]
if vertabla==True:
titulo = ' [xi, yi, d1yi, d2yi,'
titulo = titulo + ' término 1, término 2 ]'
np.set_printoptions(precision)
print(' EDO con Taylor 3 términos')
print(titulo)
print(tabla)
return(tabla)
# PROGRAMA -----------------
# Ref Rodriguez 9.1.1 p335 ejemplo.
# prueba y'-y-x+(x**2)-1 =0, y(0)=1
# INGRESO.
# d1y = y', d2y = y''
d1y = lambda x,y: y - x**2 + x + 1
d2y = lambda x,y: y - x**2 - x + 2
x0 = 0
y0 = 1
h = 0.1
muestras = 5
# PROCEDIMIENTO
tabla = edo_taylor3t(d1y,d2y,x0,y0,h,muestras,
vertabla=True)
# SALIDA
##print(' EDO con Taylor 3 términos')
##print(' [xi, yi, d1yi,',
## ' d2yi, término 1, término 2 ]')
##print(tabla)
# GRAFICA
import matplotlib.pyplot as plt
xi = tabla[:,0]
yi = tabla[:,1]
plt.plot(xi,yi)
plt.plot(xi[0],yi[0],'o', color='r', label ='[x0,y0]')
plt.plot(xi[1:],yi[1:],'o', color='g', label ='y estimada')
plt.title('EDO: Solución con Taylor 3 términos')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.grid()
#plt.show() #comentar para la siguiente gráfica
# GRAFICA CON ANIMACION --------
# import matplotlib.pyplot as plt
import matplotlib.animation as animation
unmetodo = 'Edo con Taylor 3 términos'
narchivo = 'EdoTaylor3t' # nombre archivo GIF
muestras = 51
# Puntos para la gráfica
a = xi[0]
b = xi[1]
term1 = tabla[:,4]
term2 = tabla[:,5]
dfi = tabla[:,2]
n = len(xi)
# Parametros de trama/foto
retardo = 1000 # milisegundos entre tramas
tramas = len(xi)
# GRAFICA animada en fig_ani
fig_ani, graf_ani = plt.subplots()
ymax = np.max([yi[0],yi[2]])
ymin = np.min([yi[0],yi[2]])
deltax = np.abs(xi[2]-xi[0])
deltay = np.abs(yi[2]-yi[0])
graf_ani.set_xlim([xi[0],xi[2]+0.05*deltax])
graf_ani.set_ylim([ymin-0.05*deltay,ymax+0.05*deltay])
# Lineas y puntos base
linea_fx, = graf_ani.plot(xi, yi,color='blue',
linestyle='dashed')
puntof, = graf_ani.plot(xi[0], yi[0],'o',
color='green',
label='xi,yi')
puntoa, = graf_ani.plot(xi[0], yi[0],'o',
color='Blue')
puntob, = graf_ani.plot(xi[1], yi[1],'o',
color='orange')
linea_h, = graf_ani.plot(xi, xi, color='orange',
label='h',
linestyle='dashed')
linea_term1, = graf_ani.plot(xi, xi,
color='green',label="h*y'[i]",
linestyle='dashed')
linea_term2, = graf_ani.plot(xi, yi, linewidth=4,
color='magenta',
label="((h**2)/2!)*y''[i]")
# Aproximacion con tangente
b0 = yi[0] - dfi[1]*xi[0]
tangentei = dfi[1]*xi + b0
linea_tang, = graf_ani.plot(xi, tangentei, color='dodgerblue',
label="tangente",
linestyle='dotted')
# Cuadros de texto en gráfico
txt_i = graf_ani.text(xi[0], yi[0]+0.03*deltay,'[x[i],y[i]]',
horizontalalignment='center')
txt_i1 = graf_ani.text(xi[1], xi[1]+0.03*deltay,'[x[i+1],y[i+1]]',
horizontalalignment='center')
# Configura gráfica
graf_ani.axhline(0, color='black') # Linea horizontal en cero
graf_ani.set_title(unmetodo)
graf_ani.set_xlabel('x')
graf_ani.set_ylabel('f(x)')
graf_ani.legend()
graf_ani.grid()
# Nueva Trama
def unatrama(i,xi,yi,dfi,term1,term2):
if i>1:
ymax = np.max([yi[0:i+2]])
ymin = np.min([yi[0:i+2]])
deltax = np.abs(xi[i+1]-xi[0])
deltay = np.abs(ymax-ymin)
graf_ani.set_xlim([xi[0]-0.05*deltax,xi[i+1]+0.05*deltax])
graf_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
else:
ymax = np.max([yi[0],yi[2]])
ymin = np.min([yi[0],yi[2]])
deltax = np.abs(xi[2]-xi[0])
deltay = np.abs(ymax-ymin)
graf_ani.set_xlim([xi[0]-0.05*deltax,xi[2]+0.05*deltax])
graf_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
# actualiza cada punto
puntoa.set_xdata([xi[i]])
puntoa.set_ydata([yi[i]])
puntob.set_xdata([xi[i+1]])
puntob.set_ydata([yi[i+1]])
puntof.set_xdata([xi[0:i]])
puntof.set_ydata([yi[0:i]])
# actualiza cada linea
linea_fx.set_xdata(xi[0:i+1])
linea_fx.set_ydata(yi[0:i+1])
linea_h.set_xdata([xi[i],xi[i+1]])
linea_h.set_ydata([yi[i],yi[i]])
linea_term1.set_xdata([xi[i+1],xi[i+1]])
linea_term1.set_ydata([yi[i],yi[i]+term1[i+1]])
linea_term2.set_xdata([xi[i+1],xi[i+1]])
linea_term2.set_ydata([yi[i]+term1[i+1],
yi[i]+term1[i+1]+term2[i+1]])
b0 = yi[i] - dfi[i+1]*xi[i]
tangentei = dfi[i+1]*xi + b0
linea_tang.set_ydata(tangentei)
# actualiza texto
txt_i.set_position([xi[i], yi[i]+0.03*deltay])
txt_i1.set_position([xi[i+1], yi[i+1]+0.03*deltay])
return (puntoa,puntob,puntof,
linea_fx,linea_h,linea_tang,
linea_term1,linea_term2,
txt_i,txt_i1,)
# Limpia Trama anterior
def limpiatrama():
puntoa.set_ydata(np.ma.array(xi, mask=True))
puntob.set_ydata(np.ma.array(xi, mask=True))
puntof.set_ydata(np.ma.array(xi, mask=True))
linea_h.set_ydata(np.ma.array(xi, mask=True))
linea_term1.set_ydata(np.ma.array(xi, mask=True))
linea_term2.set_ydata(np.ma.array(xi, mask=True))
linea_tang.set_ydata(np.ma.array(xi, mask=True))
return (puntoa,puntob,puntof,
linea_fx,linea_h,linea_tang,
linea_term1,linea_term2,
txt_i,txt_i1,)
# Trama contador
i = np.arange(0,tramas-1,1)
ani = animation.FuncAnimation(fig_ani,
unatrama,
i ,
fargs = (xi,yi,dfi,term1,term2),
init_func = limpiatrama,
interval = retardo,
blit=False)
# Graba Archivo GIFAnimado y video
ani.save(narchivo+'_GIFanimado.gif', writer='imagemagick')
# ani.save(narchivo+'_video.mp4')
plt.draw()
plt.show()
animación: [ EDO Taylor 3t ] [ Runge Kutta dy/dx ] [ Sistemas EDO con RK ]
..
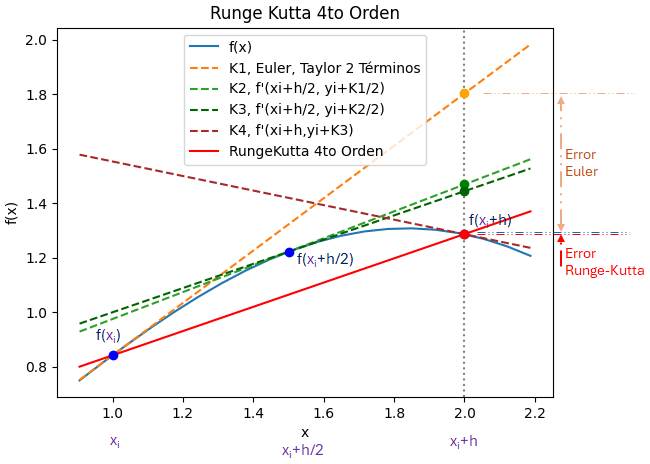
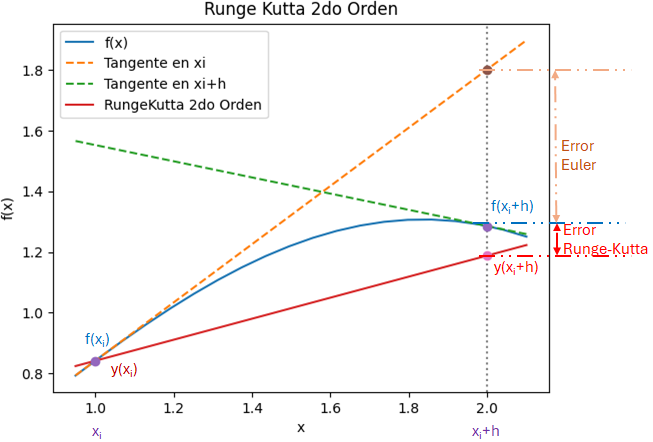
Runge Kutta de 2do Orden para primera derivada
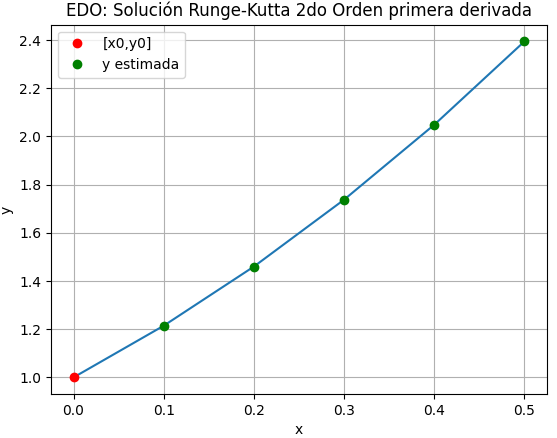
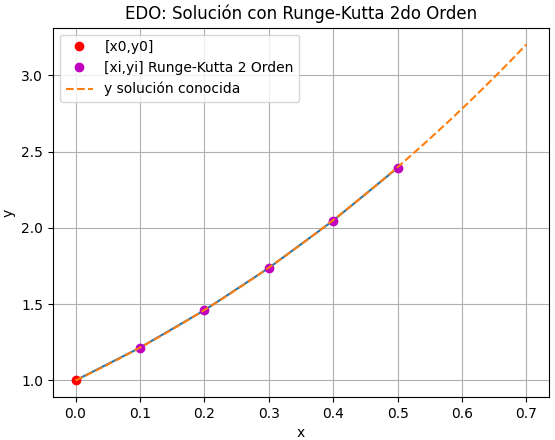
EDO con Runge-Kutta 2do Orden primera derivada
[xi, yi, K1, K2 ]
[[0. 1. 0. 0. ]
[0.1 1.2145 0.2 0.229 ]
[0.2 1.459973 0.23045 0.260495]
[0.3 1.73757 0.261997 0.293197]
[0.4 2.048564 0.294757 0.327233]
[0.5 2.394364 0.328856 0.362742]]
Instrucciones en Python
# EDO. Método de Runge-Kutta 2do Orden primera derivada
# estima solucion para muestras separadas h en eje x
# valores iniciales x0,y0
import numpy as np
def rungekutta2(d1y,x0,y0,h,muestras, vertabla=False, precision=6):
''' solucion a EDO con Runge-Kutta 2do Orden primera derivada,
x0,y0 son valores iniciales
muestras es la cantidad de puntos a calcular con tamaño de paso h.
'''
# Runge Kutta de 2do orden
tamano = muestras + 1
tabla = np.zeros(shape=(tamano,2+2),dtype=float)
# incluye el punto [x0,y0]
tabla[0] = [x0,y0,0,0]
xi = x0
yi = y0
for i in range(1,tamano,1):
K1 = h * d1y(xi,yi)
K2 = h * d1y(xi+h, yi + K1)
yi = yi + (1/2)*(K1+K2)
xi = xi + h
tabla[i] = [xi,yi,K1,K2]
if vertabla==True:
np.set_printoptions(precision)
titulo = ' [xi, yi, K1, K2 ]'
print(' EDO con Runge-Kutta 2do Orden primera derivada')
print(titulo)
print(tabla)
return(tabla)
# PROGRAMA -----------------
# Ref Rodriguez 9.1.1 p335 ejemplo.
# prueba y'-y-x+(x**2)-1 =0, y(0)=1
# INGRESO.
# d1y = y', d2y = y''
d1y = lambda x,y: y - x**2 + x + 1
d2y = lambda x,y: y - x**2 - x + 2
x0 = 0
y0 = 1
h = 0.1
muestras = 5
# PROCEDIMIENTO
tabla = rungekutta2(d1y,x0,y0,h,muestras,
vertabla=True)
# SALIDA
##print(' EDO con Runge-Kutta 2do Orden primera derivada')
##print(' [xi, yi, d1yi,',', K1, K2 ]')
##print(tabla)
# GRAFICA
import matplotlib.pyplot as plt
xi = tabla[:,0]
yi = tabla[:,1]
plt.plot(xi,yi)
plt.plot(xi[0],yi[0],'o', color='r', label ='[x0,y0]')
plt.plot(xi[1:],yi[1:],'o', color='g', label ='y estimada')
plt.title('EDO: Solución Runge-Kutta 2do Orden primera derivada')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()
plt.grid()
#plt.show() #comentar para la siguiente gráfica
# GRAFICA CON ANIMACION --------
# import matplotlib.pyplot as plt
import matplotlib.animation as animation
unmetodo = 'EDO: Runge-Kutta 2do Orden primera derivada'
narchivo = 'EdoRK2df' # nombre archivo GIF
muestras = 51
# Puntos para la gráfica
a = xi[0]
b = xi[1]
K1 = tabla[:,2]
K2 = tabla[:,3]
n = len(xi)
# Parametros de trama/foto
retardo = 1000 # milisegundos entre tramas
tramas = len(xi)
# GRAFICA animada en fig_ani
fig_ani, graf_ani = plt.subplots()
ymax = np.max([yi[0],yi[2]])
ymin = np.min([yi[0],yi[2]])
deltax = np.abs(xi[2]-xi[0])
deltay = np.abs(yi[2]-yi[0])
graf_ani.set_xlim([xi[0]-0.05*deltax,xi[2]+0.05*deltax])
graf_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
# Lineas y puntos base
linea_fx, = graf_ani.plot(xi, yi,color='blue',
linestyle='dashed')
puntof, = graf_ani.plot(xi[0], yi[0],'o',
color='green',
label='xi,yi')
puntoa, = graf_ani.plot(xi[0], yi[0],'o',
color='Blue')
puntob, = graf_ani.plot(xi[1], yi[1],'o',
color='orange')
linea_h, = graf_ani.plot(xi, xi, color='orange',
label='h',
linestyle='dashed')
linea_K1, = graf_ani.plot(xi-0.02*deltax, xi-0.02*deltax,
color='green',label="K1",
linestyle='dashed')
linea_K2, = graf_ani.plot(xi+0.02*deltax, yi,
color='magenta',
label="K2",
linestyle='dashed')
linea_K12, = graf_ani.plot(xi, yi,
color='magenta')
# Cuadros de texto en gráfico
txt_i = graf_ani.text(xi[0], yi[0]+0.05*deltay,'[x[i],y[i]]',
horizontalalignment='center')
txt_i1 = graf_ani.text(xi[1], xi[1]+0.05*deltay,'[x[i+1],y[i+1]]',
horizontalalignment='center')
# Configura gráfica
graf_ani.axhline(0, color='black') # Linea horizontal en cero
graf_ani.set_title(unmetodo)
graf_ani.set_xlabel('x')
graf_ani.set_ylabel('f(x)')
graf_ani.legend()
graf_ani.grid()
# Nueva Trama
def unatrama(i,xi,yi,term1,term2):
if i>1:
ymax = np.max([yi[0:i+2]])
ymin = np.min([yi[0:i+2]])
deltax = np.abs(xi[i+1]-xi[0])
deltay = np.abs(ymax-ymin)
graf_ani.set_xlim([xi[0]-0.05*deltax,xi[i+1]+0.05*deltax])
graf_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
else:
ymax = np.max([yi[0],yi[2]])
ymin = np.min([yi[0],yi[2]])
deltax = np.abs(xi[2]-xi[0])
deltay = np.abs(ymax-ymin)
graf_ani.set_xlim([xi[0]-0.05*deltax,xi[2]+0.05*deltax])
graf_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
# actualiza cada punto
puntoa.set_xdata([xi[i]])
puntoa.set_ydata([yi[i]])
puntob.set_xdata([xi[i+1]])
puntob.set_ydata([yi[i+1]])
puntof.set_xdata(xi[0:i])
puntof.set_ydata(yi[0:i])
# actualiza cada linea
linea_fx.set_xdata(xi[0:i+1])
linea_fx.set_ydata(yi[0:i+1])
linea_h.set_xdata([xi[i],xi[i+1]])
linea_h.set_ydata([yi[i],yi[i]])
linea_K1.set_xdata([xi[i+1]-0.02*deltax,xi[i+1]-0.02*deltax])
linea_K1.set_ydata([yi[i],yi[i]+K1[i+1]])
linea_K2.set_xdata([xi[i+1]+0.02*deltax,xi[i+1]+0.02*deltax])
linea_K2.set_ydata([yi[i],yi[i]+K2[i+1]])
linea_K12.set_xdata([xi[i+1]-0.02*deltax,xi[i+1]+0.02*deltax])
linea_K12.set_ydata([yi[i]+K1[i+1],yi[i]+K2[i+1]])
# actualiza texto
txt_i.set_position([xi[i], yi[i]+0.05*deltay])
txt_i1.set_position([xi[i+1], yi[i+1]+0.05*deltay])
return (puntoa,puntob,puntof,
linea_fx,linea_h,linea_K1,linea_K2,linea_K12,
txt_i,txt_i1,)
# Limpia Trama anterior
def limpiatrama():
puntoa.set_ydata(np.ma.array(xi, mask=True))
puntob.set_ydata(np.ma.array(xi, mask=True))
puntof.set_ydata(np.ma.array(xi, mask=True))
linea_h.set_ydata(np.ma.array(xi, mask=True))
linea_K1.set_ydata(np.ma.array(xi, mask=True))
linea_K2.set_ydata(np.ma.array(xi, mask=True))
linea_K12.set_ydata(np.ma.array(xi, mask=True))
return (puntoa,puntob,puntof,
linea_fx,linea_h,linea_K1,linea_K2,linea_K12,
txt_i,txt_i1,)
# Trama contador
i = np.arange(0,tramas-1,1)
ani = animation.FuncAnimation(fig_ani,
unatrama,
i ,
fargs = (xi,yi,K1,K2),
init_func = limpiatrama,
interval = retardo,
blit=False)
# Graba Archivo GIFAnimado y video
ani.save(narchivo+'_GIFanimado.gif', writer='imagemagick')
# ani.save(narchivo+'_video.mp4')
plt.draw()
plt.show()
animación: [ EDO Taylor 3t ] [ Runge Kutta dy/dx ] [ Sistemas EDO con RK ]
..
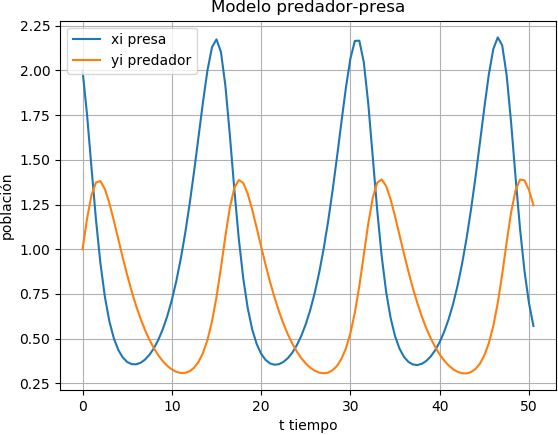
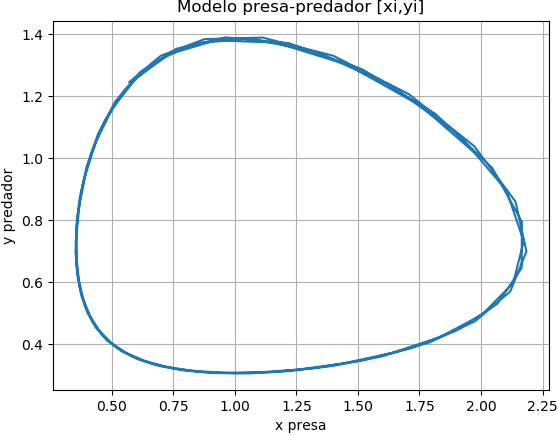
Sistemas EDO. modelo depredador-presa con Runge-Kutta 2do Orden
.
Instrucciones en Python
# Modelo predador-presa de Lotka-Volterra
# Sistemas EDO con Runge Kutta de 2do Orden
import numpy as np
def rungekutta2_fg(f,g,x0,y0,z0,h,muestras,
vertabla=False, precision = 6):
''' solucion a EDO con Runge-Kutta 2do Orden Segunda derivada,
x0,y0 son valores iniciales, h es tamano de paso,
muestras es la cantidad de puntos a calcular.
'''
tamano = muestras + 1
tabla = np.zeros(shape=(tamano,3+4),dtype=float)
# incluye el punto [x0,y0,z0]
tabla[0] = [x0,y0,z0,0,0,0,0]
xi = x0
yi = y0
zi = z0
i=0
if vertabla==True:
print('Runge-Kutta Segunda derivada')
print('i ','[ xi, yi, zi',']')
print(' [ K1y, K1z, K2y, K2z ]')
np.set_printoptions(precision)
print(i,tabla[i,0:3])
print(' ',tabla[i,3:])
for i in range(1,tamano,1):
K1y = h * f(xi,yi,zi)
K1z = h * g(xi,yi,zi)
K2y = h * f(xi+h, yi + K1y, zi + K1z)
K2z = h * g(xi+h, yi + K1y, zi + K1z)
yi = yi + (K1y+K2y)/2
zi = zi + (K1z+K2z)/2
xi = xi + h
tabla[i] = [xi,yi,zi,K1y,K1z,K2y,K2z]
if vertabla==True:
txt = ' '
if i>=10:
txt=' '
print(str(i)+'',tabla[i,0:3])
print(txt,tabla[i,3:])
return(tabla)
# PROGRAMA ------------------
# INGRESO
# Parámetros de las ecuaciones
a = 0.5
b = 0.7
c = 0.35
d = 0.35
# Ecuaciones
f = lambda t,x,y : a*x -b*x*y
g = lambda t,x,y : -c*y + d*x*y
# Condiciones iniciales
t0 = 0
x0 = 2
y0 = 1
# parámetros del algoritmo
h = 0.5
muestras = 101
# PROCEDIMIENTO
tabla = rungekutta2_fg(f,g,t0,x0,y0,h,muestras,vertabla=True)
ti = tabla[:,0]
xi = tabla[:,1]
yi = tabla[:,2]
# SALIDA
print('Sistemas EDO: Modelo presa-predador')
##np.set_printoptions(precision=6)
##print(' [ ti, xi, yi]')
##print(tabla[:,0:4])
# GRAFICA tiempos vs población
import matplotlib.pyplot as plt
fig_t, (graf1,graf2) = plt.subplots(2)
fig_t.suptitle('Modelo predador-presa')
graf1.plot(ti,xi, color='blue',label='xi presa')
#graf1.set_xlabel('t tiempo')
graf1.set_ylabel('población x')
graf1.legend()
graf1.grid()
graf2.plot(ti,yi, color='orange',label='yi predador')
graf2.set_xlabel('t tiempo')
graf2.set_ylabel('población y')
graf2.legend()
graf2.grid()
# gráfica xi vs yi
fig_xy, graf3 = plt.subplots()
graf3.plot(xi,yi)
graf3.set_title('Modelo presa-predador [xi,yi]')
graf3.set_xlabel('x presa')
graf3.set_ylabel('y predador')
graf3.grid()
#plt.show()
# GRAFICA CON ANIMACION --------
# import matplotlib.pyplot as plt
import matplotlib.animation as animation
xi = tabla[:,0]
yi = tabla[:,1]
zi = tabla[:,2]
unmetodo = 'Sistemas EDO Presa-Predador con Runge-Kutta'
narchivo = 'EdoPresaPredador' # nombre archivo GIF
muestras = 51
# Puntos para la gráfica
a = xi[0]
b = xi[1]
n = len(ti)
# Parametros de trama/foto
retardo = 1000 # milisegundos entre tramas
tramas = len(xi)
# GRAFICA animada en fig_ani
fig_ani, (graf1_ani,graf2_ani) = plt.subplots(2)
ymax = np.max([yi[0],yi[2]])
ymin = np.min([yi[0],yi[2]])
deltax = np.abs(xi[2]-xi[0])
deltay = np.abs(yi[2]-yi[0])
graf1_ani.set_xlim([xi[0],xi[2]+0.05*deltax])
graf1_ani.set_ylim([ymin-0.05*deltay,ymax+0.05*deltay])
zmax = np.max([zi[0],zi[2]])
zmin = np.min([zi[0],zi[2]])
deltax = np.abs(xi[2]-xi[0])
deltaz = np.abs(zi[2]-zi[0])
graf2_ani.set_xlim([xi[0],xi[2]+0.05*deltax])
graf2_ani.set_ylim([zmin-0.05*deltaz,zmax+0.05*deltaz])
# Lineas y puntos base
linea_fx, = graf1_ani.plot(xi, yi,color='blue',
linestyle='dashed')
puntof, = graf1_ani.plot(xi[0], yi[0],'o',
color='blue',
label='xi,yi')
puntoa, = graf1_ani.plot(xi[0], yi[0],'o',
color='green')
puntob, = graf1_ani.plot(xi[1], yi[1],'o',
color='dodgerblue')
linea_h, = graf1_ani.plot(xi, xi, color='green',
label='h',
linestyle='dashed')
linea_term1, = graf1_ani.plot(xi, xi,
color='dodgerblue',label="(K1y+K2y)/2",
linestyle='dashed')
# Cuadros de texto en gráfico
#txt_i = graf1_ani.text(xi[0], yi[0]+0.03*deltay,'[x[i],y[i]]',
# horizontalalignment='center')
#txt_i1 = graf1_ani.text(xi[1], xi[1]+0.03*deltay,'[x[i+1],y[i+1]]',
# horizontalalignment='center')
linea_gx, = graf2_ani.plot(xi, zi,color='orange',
linestyle='dashed')
puntog, = graf2_ani.plot(xi[0], zi[0],'o',
color='orange',
label='xi,zi')
puntog_a, = graf2_ani.plot(xi[0], zi[0],'o',
color='green')
puntog_b, = graf2_ani.plot(xi[1], zi[1],'o',
color='red')
lineag_h, = graf2_ani.plot(xi, xi, color='green',
label='h',
linestyle='dashed')
lineag_term1, = graf2_ani.plot(xi, xi,
color='red',label="(K1z+K2z)/2",
linestyle='dashed')
# Configura gráfica
graf1_ani.axhline(0, color='black') # Linea horizontal en cero
graf1_ani.set_title(unmetodo)
graf1_ani.set_xlabel('x')
graf1_ani.set_ylabel('y(x)')
graf1_ani.legend()
graf1_ani.grid()
graf2_ani.axhline(0, color='black') # Linea horizontal en cero
#graf2_ani.set_title(unmetodo)
graf2_ani.set_xlabel('x')
graf2_ani.set_ylabel('z(x)')
graf2_ani.legend()
graf2_ani.grid()
# Nueva Trama
def unatrama(i,xi,yi,zi):
if i>1:
ymax = np.max([yi[0:i+2]])
ymin = np.min([yi[0:i+2]])
deltax = np.abs(xi[i+1]-xi[0])
deltay = np.abs(ymax-ymin)
graf1_ani.set_xlim([xi[0]-0.05*deltax,xi[i+1]+0.05*deltax])
graf1_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
zmax = np.max([zi[0:i+2]])
zmin = np.min([zi[0:i+2]])
deltaz = np.abs(zmax-zmin)
graf2_ani.set_xlim([xi[0]-0.05*deltax,xi[i+1]+0.05*deltax])
graf2_ani.set_ylim([zmin-0.05*deltaz,zmax+0.1*deltaz])
else:
ymax = np.max([yi[0:2]])
ymin = np.min([yi[0:2]])
deltax = np.abs(xi[2]-xi[0])
deltay = np.abs(ymax-ymin)
graf1_ani.set_xlim([xi[0]-0.05*deltax,xi[2]+0.05*deltax])
graf1_ani.set_ylim([ymin-0.05*deltay,ymax+0.1*deltay])
zmax = np.max([zi[0:2]])
zmin = np.min([zi[0:2]])
deltaz = np.abs(zmax-zmin)
graf2_ani.set_xlim([xi[0]-0.05*deltax,xi[2]+0.05*deltax])
graf2_ani.set_ylim([zmin-0.05*deltaz,zmax+0.1*deltaz])
# actualiza cada punto
puntoa.set_xdata([xi[i]])
puntoa.set_ydata([yi[i]])
puntob.set_xdata([xi[i+1]])
puntob.set_ydata([yi[i+1]])
puntof.set_xdata(xi[0:i])
puntof.set_ydata(yi[0:i])
# actualiza cada linea
linea_fx.set_xdata(xi[0:i+1])
linea_fx.set_ydata(yi[0:i+1])
linea_h.set_xdata([xi[i],xi[i+1]])
linea_h.set_ydata([yi[i],yi[i]])
linea_term1.set_xdata([xi[i+1],xi[i+1]])
linea_term1.set_ydata([yi[i],yi[i+1]])
# actualiza texto
#txt_i.set_position([xi[i], yi[i]+0.03*deltay])
#txt_i1.set_position([xi[i+1], yi[i+1]+0.03*deltay])
# actualiza cada punto
puntog_a.set_xdata([xi[i]])
puntog_a.set_ydata([zi[i]])
puntog_b.set_xdata([xi[i+1]])
puntog_b.set_ydata([zi[i+1]])
puntog.set_xdata(xi[0:i])
puntog.set_ydata(zi[0:i])
# actualiza cada linea
linea_gx.set_xdata(xi[0:i+1])
linea_gx.set_ydata(zi[0:i+1])
lineag_h.set_xdata([xi[i],xi[i+1]])
lineag_h.set_ydata([zi[i],zi[i]])
lineag_term1.set_xdata([xi[i+1],xi[i+1]])
lineag_term1.set_ydata([zi[i],zi[i+1]])
return (puntoa,puntob,puntof,
linea_fx,linea_h,
linea_term1,)
#txt_i,txt_i1,)
# Limpia Trama anterior
def limpiatrama():
puntoa.set_ydata(np.ma.array(xi, mask=True))
puntob.set_ydata(np.ma.array(xi, mask=True))
puntof.set_ydata(np.ma.array(xi, mask=True))
linea_h.set_ydata(np.ma.array(xi, mask=True))
linea_term1.set_ydata(np.ma.array(xi, mask=True))
puntog_a.set_ydata(np.ma.array(xi, mask=True))
puntog_b.set_ydata(np.ma.array(xi, mask=True))
puntog.set_ydata(np.ma.array(xi, mask=True))
lineag_h.set_ydata(np.ma.array(xi, mask=True))
lineag_term1.set_ydata(np.ma.array(xi, mask=True))
return (puntoa,puntob,puntof,
linea_fx,linea_h,
linea_term1,
puntog_a,puntog_b,puntog,
linea_gx,lineag_h,
lineag_term1,)
#txt_i,txt_i1,)
# Trama contador
i = np.arange(0,tramas-1,1)
ani = animation.FuncAnimation(fig_ani,
unatrama,
i ,
fargs = (xi,yi,zi),
init_func = limpiatrama,
interval = retardo,
blit=False)
# Graba Archivo GIFAnimado y video
ani.save(narchivo+'_GIFanimado.gif', writer='imagemagick')
# ani.save(narchivo+'_video.mp4')
plt.draw()
plt.show()
animación: [ EDO Taylor 3t ] [ Runge Kutta dy/dx ] [ Sistemas EDO con RK ]