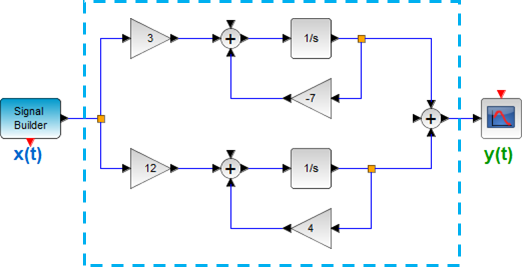
Ejercicio: 1Eva2016TII_T1 LTI CT Sistema en paralelo-serie
a. respuestas impulso de los subsistemas SS1, SS2 y SS3
realizadas a partir de las respuestas de paso, x(t) = μ(t), entrada escalón unitario:
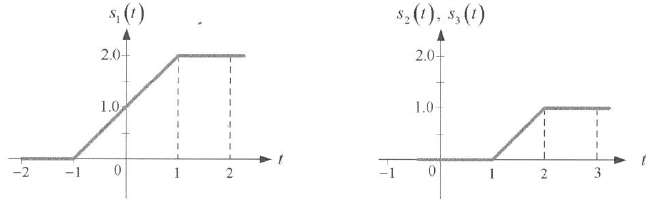
s_1(t) = r(t+1) - r(t-1)
s_2(t) = s_3(t) = r(t-1) - r(t-2)
h_1 (t) = \frac{\delta}{\delta t} s_1(t)
h_1 (t) = \frac{\delta}{\delta t} [ r(t+1) - r(t-1)]
= \frac{\delta}{\delta t}[(t+1)\mu (t+1) - (t-1)\mu (t-1)]
= (1) \mu (t+1) +(t+1) \delta(t+1) -[ (1)\mu (t-1) + (t-1)\delta(t-1)]
= \mu (t+1) +0 -[ (1)\mu (t-1) + 0]
= \mu (t+1) - \mu (t-1)
h_2 (t) = \frac{\delta}{\delta t} s_2(t)
h_2 (t) = \frac{\delta}{\delta t} [(t-1) \mu (t-1) - (t-2) \mu (t-2)
siguiendo el desarrollo para h1(t)
h_2 (t) = \mu (t-1) - \mu (t-2)
por lo que también:
h_3 (t) = h_2 (t) =\mu (t-1) - \mu (t-2)
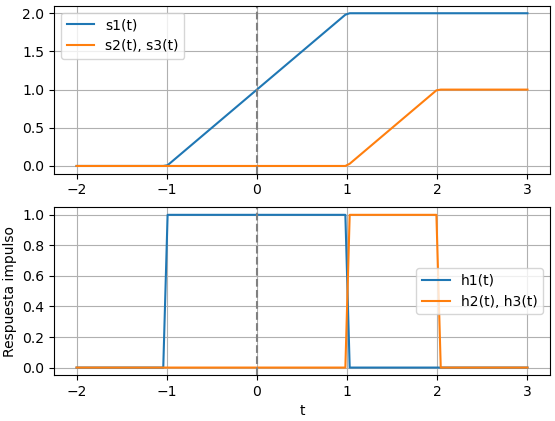
respuesta con el algoritmo:
literal a: Respuestas de paso
s1: -(t - 1)*Heaviside(t - 1) + (t + 1)*Heaviside(t + 1)
s2: -(t - 2)*Heaviside(t - 2) + (t - 1)*Heaviside(t - 1)
s3: -(t - 2)*Heaviside(t - 2) + (t - 1)*Heaviside(t - 1)
literal a: Respuestas impulso
h1: -(t - 1)*DiracDelta(t - 1) + (t + 1)*DiracDelta(t + 1)
- Heaviside(t - 1) + Heaviside(t + 1)
h2: -(t - 2)*DiracDelta(t - 2) + (t - 1)*DiracDelta(t - 1)
- Heaviside(t - 2) + Heaviside(t - 1)
h3: -(t - 2)*DiracDelta(t - 2) + (t - 1)*DiracDelta(t - 1)
- Heaviside(t - 2) + Heaviside(t - 1)
Instrucciones en Python
# 1Eva2016TII_T1 Sistema LTIC en paralelo-serie
import numpy as np
import matplotlib.pyplot as plt
import sympy as sym
equivalentes = [{'DiracDelta': lambda x: 1*(x==0)},
{'Heaviside': lambda x,y: np.heaviside(x, 1)},
'numpy',]
# INGRESO
t = sym.Symbol('t', real=True)
u = sym.Heaviside(t)
r = t*u
# literal a, repuesta de paso
s1 = r.subs(t,t+1) - r.subs(t,t-1)
s2 = r.subs(t,t-1) - r.subs(t,t-2)
s3 = r.subs(t,t-1) - r.subs(t,t-2)
t_a = -2 ; t_b = 3
# PROCEDIMIENTO
muestras = (t_b-t_a)*(20+1)
ti = np.linspace(t_a,t_b,muestras)
s1n = sym.lambdify(t,s1, modules=equivalentes)
s2n = sym.lambdify(t,s2, modules=equivalentes)
s1i = s1n(ti)
s2i = s2n(ti)
# literal a, respuesta impulso
h1 = sym.diff(s1,t,1)
h2 = sym.diff(s2,t,1)
h3 = sym.diff(s3,t,1)
h1n = sym.lambdify(t,h1, modules=equivalentes)
h2n = sym.lambdify(t,h2, modules=equivalentes)
h3n = sym.lambdify(t,h3, modules=equivalentes)
h1i = h1n(ti)
h2i = h2n(ti)
h3i = h3n(ti)
# SALIDA
print(' literal a: Respuestas de paso')
print('s1: ',s1)
print('s2: ',s2)
print('s3: ',s3)
print(' literal a: Respuestas impulso')
print('h1: ',h1)
print('h2: ',h2)
print('h3: ',h3)
# Gráfica
plt.subplot(211)
plt.plot(ti,s1i,label ='s1(t)')
plt.plot(ti,s2i,label ='s2(t), s3(t)')
plt.axvline(0, linestyle='dashed',color='grey')
plt.legend()
plt.grid()
plt.subplot(212)
plt.plot(ti,h1i,label ='h1(t)')
plt.plot(ti,h2i,label ='h2(t), h3(t)')
plt.axvline(0, linestyle='dashed',color='grey')
plt.ylabel('Respuesta impulso')
plt.xlabel('t')
plt.legend()
plt.grid()
plt.show()
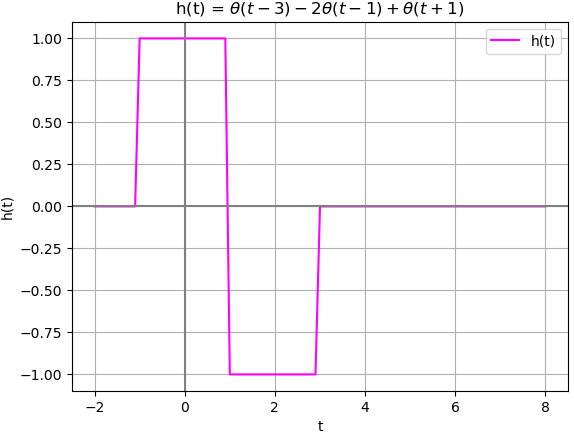
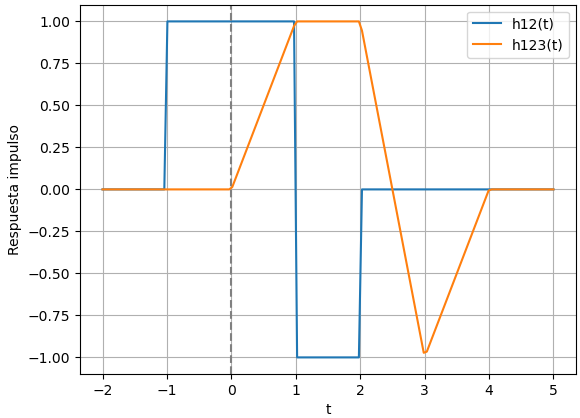
b. respuestas impulso h12(t) y respuesta de paso (escalón unitario) s12(t)
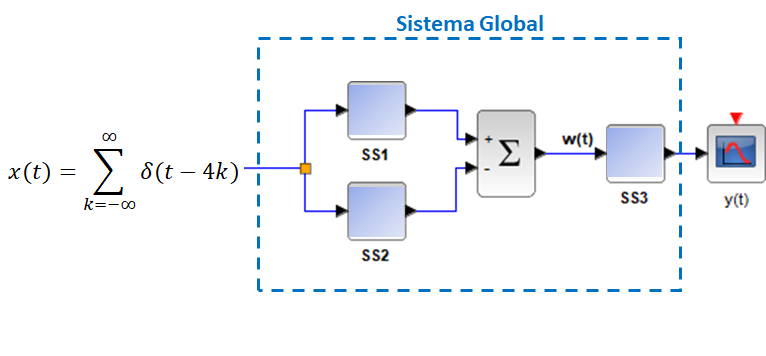
los sistemas SS1 y SS2 se encuentran con un operador suma en paralelo ,restando SS2, por lo que las respuestas al impulso son:
h_{12} (t) = h_1 (t) - h_2 (t)
= [\mu (t+1) - \mu (t-1)] - [\mu (t-1) - \mu (t-2)]
= \mu (t+1) - 2 \mu (t-1) + \mu (t-2)
la "respuesta de paso" se encuentran como:
s_{12} (t) = \int_{-\infty}^{\infty} h_{12}(t) \delta t = h_{12} (t) \circledast \mu (t)
s_{12} (t) = [\mu (t+1) - 2 \mu (t-1) - \mu (t-2)] \circledast \mu (t)
Usando la tabla de integrales de convolución, fila 3:
s_{12} (t) = r(t+1) -2 r(t-1) + r(t-2)
c. respuesta impulso del sistema global h123(t)
A partir de h12(t) y h3(t), que se encuentran en serie (cascada), se tiene que:
h_{123} (t) = h_{12} (t) \circledast h_3 (t)
\frac{\delta}{\delta t}h_{123} (t) = \frac{\delta}{\delta t}[h_{12} (t) \circledast h_3 (t)]
= \frac{\delta}{\delta t}h_{12} (t) \circledast h_3 (t) = h_{12} (t) \circledast \frac{\delta}{\delta t}h_3 (t)
usando la primera expresión equivalente de la convolución:
\frac{\delta}{\delta t}h_{12} (t) = \frac{\delta}{\delta t}[\mu (t+1) - 2 \mu (t-1) + \mu (t-2)]
= \delta (t+1) - 2 \delta (t-1) + \delta (t-2)
por lo que
\frac{\delta}{\delta t}h_{123} (t) = [\delta (t+1) - 2 \delta (t-1) + \delta (t-2)] \circledast h_3 (t)
= \delta (t+1) \circledast h_3 (t) - 2 \delta (t-1) \circledast h_3 (t) + \delta (t-2) \circledast h_3 (t)
Usando la tabla de integrales de convolución, fila 1:
= h_3 (t+1) - 2 h_3 (t-1) + h_3 (t-2)
y sustituyendo las expresiones con los deplazamientos en t,
= [\mu ((t+1)-1) - \mu ((t+1)-2)]
-2[\mu ((t-1)-1) - \mu ((t-1)-2)]
+ [\mu ((t-2)-1) - \mu ((t-2)-2)]
realizado las operaciones en los paréntesis,
= \mu (t) - \mu (t-1)
- 2\mu (t-2) + 2\mu (t-3)
+ \mu (t-3) - \mu (t-4)
uniendo términos iguales, se simplifica,
\frac{\delta}{\delta t} h_{123} (t) = \mu (t) - \mu (t-1)- 2\mu (t-2) + 3\mu (t-3) - \mu (t-4)
ahora se puede calcular h123(t) como
h_{123} (t) =\frac{\delta}{\delta t} h_{123} (t) \circledast \mu (t)
= [\mu (t) - \mu (t-1)- 2\mu (t-2) + 3\mu (t-3) - \mu (t-4)] \circledast \mu (t)
= \mu (t)\circledast \mu (t) - \mu (t-1)\circledast \mu (t) -2\mu (t-2)\circledast \mu (t)+
+ 3\mu (t-3)\circledast \mu (t) - \mu (t-4) \circledast \mu (t)
Usando la tabla de integral de convolución, fila 3:
h_{123} (t) = r(t) - r(t-1) -2 r(t-2)+ 3 r(t-3) - r(t-4)
también se puede escribir en función de μ(t)
h_{123} (t) = t \mu(t) - (t-1) \mu (t-1) -2 (t-2) \mu(t-2)+
+3 (t-3) \mu(t-3) - (t-4)\mu(t-4)
Con lo que se que se obtiene la gráfica de las funciones requeridas en el literal b.
el resultado del algoritmo es:
literal b. h123(t)
h12: (t - 2)*DiracDelta(t - 2) - 2*(t - 1)*DiracDelta(t - 1)
+ (t + 1)*DiracDelta(t + 1) + Heaviside(t - 2)
- 2*Heaviside(t - 1) + Heaviside(t + 1)
h123: t*Heaviside(t) - (t - 4)*Heaviside(t - 4)
+ 3*(t - 3)*Heaviside(t - 3) -2*(t - 2)*Heaviside(t - 2)
- (t - 1)*Heaviside(t - 1)
las instrucciones adicionales en Python son:
t_a = -2 ; t_b = 5
# PROCEDIMIENTO
muestras = (t_b-t_a)*(20+1)
ti = np.linspace(t_a,t_b,muestras)
# b. respuesta impulso y paso del sistema 12 en paralelo
h12 = h1 - h2
h12n = sym.lambdify(t,h12, modules=equivalentes)
h12i = h12n(ti)
# respuesta impulso global sistema 123
h123 = r-r.subs(t,t-1)-2*r.subs(t,t-2)
h123 = h123 + 3*r.subs(t,t-3)-r.subs(t,t-4)
h123n = sym.lambdify(t,h123, modules=equivalentes)
h123i = h123n(ti)
# SALIDA
print('\nliteral b. h123(t)')
print('h12: ', h12)
print('h123: ',h123)
# Grafica
plt.plot(ti,h12i,label ='h12(t)')
plt.axvline(0, linestyle='dashed'
,color='grey')
plt.plot(ti,h123i,label ='h123(t)')
plt.ylabel('Respuesta impulso')
plt.xlabel('t')
plt.legend()
plt.grid()
plt.show()
litera b. Tabla de respuestas
Subsistema LTIC SS1
- h1(t) no tiene la forma kδ(T), por lo que SSI es con memoria.
- h1(t) ≠ 0, t<0, el sistema no es causal.
- La respuesta al impulso es absolutamente integrable, por lo que es BIBO estable
Subsistema LTIC SS2 y SS3
- h2(t) y h2(t) no tienen la forma kδ(T), por lo que SS2 y SS3 tienen memoria.
- h2(t) = h3(t) = 0, t<0, los sistemas SS2 y SS3 son causales.
- La respuesta al impulso es absolutamente integrable, por lo que SS2 y SS3 son BIBO estables
Subsistema LTIC en paralelo SS1-SS2
- h12(t) no tiene la forma kδ(T), por lo que SS1-SS2 en paralelo es con memoria.
- h12(t) ≠ 0 t<0, el sistema en paralelo SS1-SS2 no es causal.
- La respuesta al impulso es absolutamente integrable, por lo que el sistema en paralelo SS1-SS2 es BIBO estable
Subsistema LTIC global SS1-SS2-SS3
- h123(t) no tiene la forma kδ(T), por lo que el sistema global es con memoria.
- h12(t) = 0 t<0, el sistema global es causal.
- La respuesta al impulso es absolutamente integrable, por lo que el sistema global es BIBO estable
literal d. salida w(t)
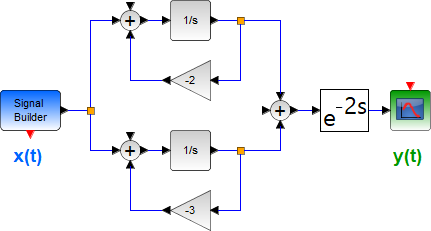
La combinación en paralelo del sistema SS1 y SS2 a partir de la entrada x(t) dada es:
w(t) = x(t) \circledast h_{12} (t) = h_{12} (t) \circledast x(t)
w(t) = h_{12} (t) \circledast \sum_{k=-\infty}^{\infty} \delta (t-4k)
= \sum_{k=-\infty}^{\infty} [h_{12} (t) \circledast\delta (t-4k)]
= \sum_{k=-\infty}^{\infty} h_{12} (t-4k)
que es una función periódica con Tk = 4.
Por ser una señal periódica, la potencia y energía se determinan en un periodo:
E_{w(t)} = \int_{-1}^{3} |w(t)|^2 \delta t
= \int_{-1}^{1} |1|^2 \delta t + \int_{1}^{2} |-1|^2 \delta t + \int_{2}^{3} |0|^2 \delta t
= \int_{-1}^{1} (1) \delta t + \int_{1}^{2} (1) \delta t = t \bigg|_{-1}^{1} + t \bigg|_{1}^{2} =2+1 =3
E_{w(t)} = 3
P_{w(t)} = \frac{E_{w(t)}}{T_0} = \frac{3}{4}
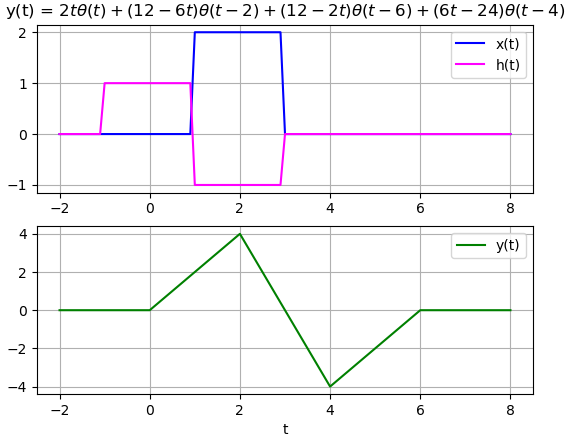
literal e. salida y(t) sistema global
y(t) = x(t) \circledast h_{123} (t) = h_{123} (t) \circledast x(t)
= h_{123} (t) \circledast \sum_{k=-\infty}^{\infty} \delta (t-4k)
= \sum_{k=-\infty}^{\infty} [h_{123} (t) \circledast \delta (t-4k)]
y(t) = \sum_{k=-\infty}^{\infty} h_{123}(t-4k)
siendo una respuesta de tipo periódica con T0 = 4, por lo que la potencia y energía se determinan en un periodo,
E_{y(t)} = \int_{0}^{4} |y(t)|^2 \delta t
= \int_{0}^{1} |t|^2 \delta t + \int_{1}^{2} |1|^2 \delta t +\int_{2}^{3} |5-2t|^2 \delta t + \int_{3}^{4} |t-4|^2 \delta t
= \frac{t^3}{3} \Big|_0^1 + t\Big|_1^2 + \int_{2}^{3}(25-20t+4t^2) \delta t+ \int_{3}^{4} |t^2-8t+16| \delta t
= (0+\frac{1}{3}) + (2-1) + [25t-10t^2+\frac{4}{3}t^3] \Big|_2^3 + [\frac{t^3}{3}-4[t^2]+16t] \Big|_3^4
= \frac{1}{3} + 1 + \Big[\big(25(3)-10(3)^2+\frac{4}{3}(3)^3\big) -\big(25(2)-10(2)^2+\frac{4}{3}(2)^3\big)\Big] +
+ \Big[\big(\frac{4^3}{3}-4[4^2]+16(4)\big) - \big(\frac{3^3}{3}-4[3^2]+16(3) \big)\Big]
= \frac{4}{3} + \Big[\big(75-90+36\big) -\big(50-40+\frac{32}{3}\big)\Big] +
+ \Big[\big(\frac{64}{3}-64 +64\big) - \big(9-36+48 \big)\Big]
= \frac{4}{3} + \frac{2}{3} = \frac{6}{3} = 2
E_{y(t)} = 2
P_{y(t)} =\frac{E_{y(t)}}{T_0} = \frac{2}{4} = \frac{1}{2}