Ejercicio: 1Eva2009TII_T2 LTI DT bloques, respuesta impulso y paso
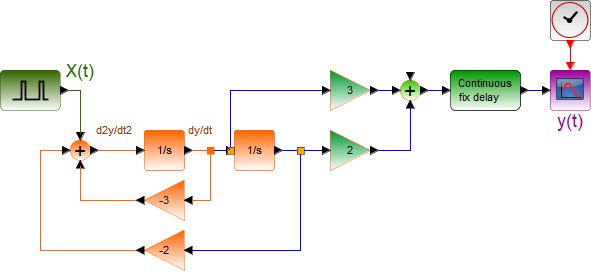
literal a. Respuesta al impulso, o H(s) del diagrama de bloques

a.1 H[z] Función de transferencia
Referencia: LTI DT – H[z] Diagrama de bloques con «1/z»
Dado que hay dos bloques (1/z) o de retraso , se identifica que los polinomios son de segundo orden (N=2). Los coeficientes de retraso se leen de arriba hacia abajo como a0,-a1,-a2 ordenados en la siguiente tabla:
| retraso | adelanto |
| a0 = 1 | b0 = 1 |
| a1 = -(3/4) = -3/4 | b1 = 0 |
| a2 = -(-1/8) = 1/8 | b2 = 0 |
Se aplica lo mismo para los coeficientes de adelanto y se completa el modelo para los polinomios del numerador y denominador:
H[z] = \frac{b_0 z^N +b_1 z^{N-1} + \text{ ... } + b_{N-1} z + b_N}{z^N + a_1 z^{N-1} +\text{ ... } + a_{N-1}z +a_N} H[z] = \frac{z^2}{z^2 - \frac{3}{4} z+\frac{1}{8}}a.2 H[z] en fracciones parciales
fracciones parciales modificadas,
\frac{H[z]}{z} = \Big( \frac{1}{z} \Big) \frac{z^2}{z^2 - \frac{3}{4} z+\frac{1}{8}} = \frac{z}{z^2 - \frac{3}{4} z+\frac{1}{8}}El polinomio del denominador es:
Q[z] = z^2 - \frac{3}{4} z+\frac{1}{8}con raíces en 1/4 y 1/2
con lo que se obtiene la expresión para usar el método de "cubrir" de Heaviside
\frac{H[z]}{z} = \frac{z}{(z-1/4)(z-1/2)}= \frac{k_1}{z-1/4}+ \frac{k_2}{z-1/2} k_1 = \frac{z}{\cancel{(z-1/4)}(z-1/2)}\Big|_{z=1/4} = \frac{1/4}{(1/4-1/2)} = -1 k_2 = \frac{z}{(z-1/4)\cancel{(z-1/2)}}\Big|_{z=1/2} = \frac{1/2}{(1/2-1/4)} = 2 \frac{H[z]}{z} = \frac{-1}{z-1/4}+ \frac{2}{z-1/2}fracciones parciales
H[z] = \frac{-z}{z-1/4}+ \frac{2z}{z-1/2}Revisando el resultado con el algoritmo en Python:
Hz:
2
z
-------------------
2
z - 0.75*z + 0.125
Hz/z:
z
-----------------------
2
1.0*z - 0.75*z + 0.125
Hz/z.apart:
1 2.0
- ------------ + -----------
1.0*z - 0.25 1.0*z - 0.5
Hz = (Hz/z)*z
z 2.0*z
- ------------ + -----------
1.0*z - 0.25 1.0*z - 0.5
polos: {0.250000000000000: 1, 0.500000000000000: 1}
polos Re: [1/4, 1/2]
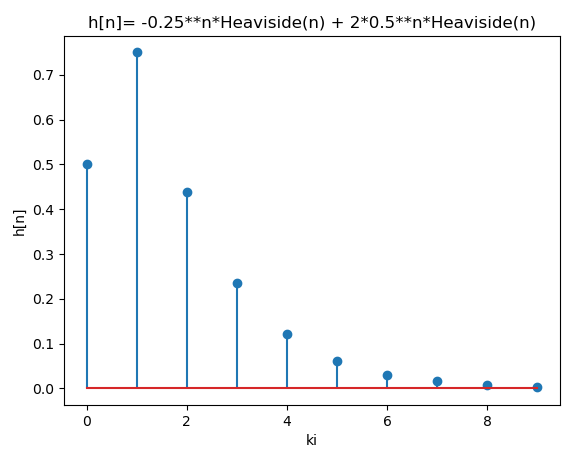
Se obtiene h[n] usando la tabla de transformadas z
Hz = (Hz/z)*z
z 2.0*z
- ------------ + -----------
1.0*z - 0.25 1.0*z - 0.5
h[n] = - \Big(\frac{1}{4}\Big)^n \mu[n]+2\Big( \frac{1}{2} \Big)^n \mu[n]
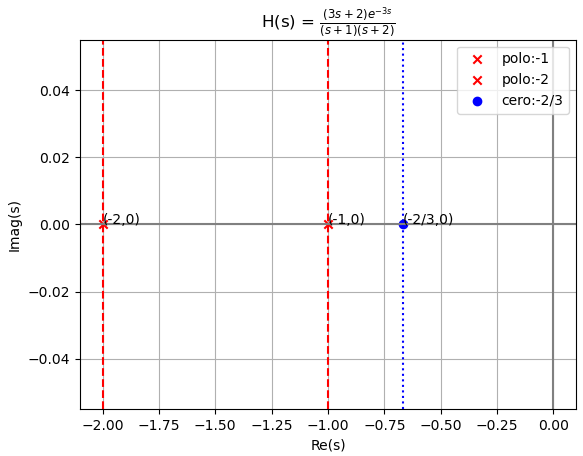
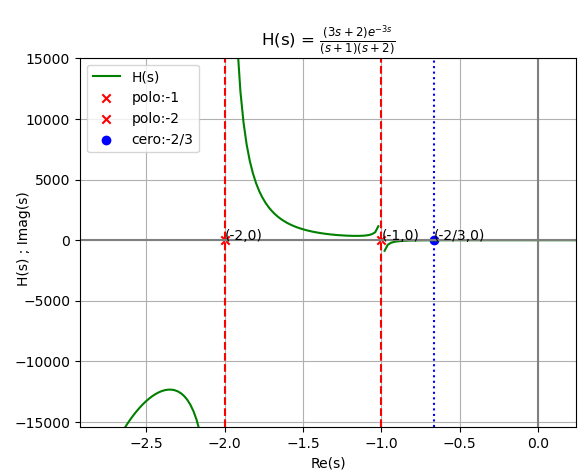
a.3. Estabilidad del sistema
Los polos son menores que un radio de 1.
La ROC para el primer polo |z|>1/4 y para el segundo polo es |z|>1/2
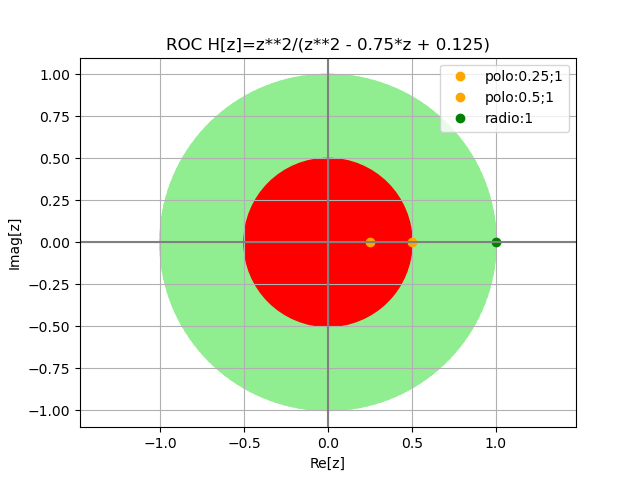
Observaciones:
Las raíces características o frecuencias naturales del sistema se encuentran dentro del círculo de radio unitario. El sistema es asintóticamente estable, que implica que es BIBO estable.
h[n] no es de la forma k δ[n], por lo que el sistema global es con memoria.
a.4 Instrucciones con Python
Usando los algoritmo de la sección LTID Transformada z – X[z] Fracciones parciales modificadas con Python se adapta para el ejercicio
# Transformada z- Fracciones parciales # Polos únicos, repetidos y complejos # Lathi Ejercicio 5.3c pd495 # blog.espol.edu.ec/telg1001 import sympy as sym import numpy as np import matplotlib.pyplot as plt # INGRESO z = sym.Symbol('z') Pz = z**2 Qz = z**2-(3/4)*z+1/8 # PROCEDIMIENTO P = Pz.as_poly(z) Q = Qz.as_poly(z) Xz = Pz/Qz # Raices Denominador Q_raiz = sym.roots(Q) Q_raizRe = sym.real_roots(Q) rcompleja = len(Q_raiz)-len(Q_raizRe) # Raices reales, únicas y repetidas if (rcompleja<=0 and len(Q_raizRe)>0): # fracciones parciales modificadas Xzz = (P/Q)/z Xzm = Xzz.apart() # fracciones parciales restaurada terminos = Xzm.args Xzp = 0*z for untermino in terminos: Xzp = Xzp + untermino*z def parametro_cuadratico(untermino): unparametro ={} # revisa denominador cuadratico [numerador,denominador] = (untermino).as_numer_denom() gradoD = 0 coeficientesD = denominador gradoN = 0 coeficientesN = numerador if not(denominador.is_constant()): denominador = denominador.as_poly() gradoD = denominador.degree() coeficientesD = denominador.coeffs() if not(numerador.is_constant()): numerador = numerador.as_poly() gradoN = numerador.degree() coeficientesN = numerador.coeffs() if gradoD == 2 and gradoN==2: a = float(coeficientesD[1])/2 gamma2 = float(coeficientesD[2]) gamma = np.sqrt(gamma2) A = float(coeficientesN[0]) B = float(coeficientesN[1]) rN = (A**2)*gamma2 + B**2 - 2*A*a*B rD = gamma2 - a**2 r = np.sqrt(rN/rD) beta = np.arccos(-a/gamma) thetaN = A*a-B thetaD = A*np.sqrt(gamma2-a**2) theta = np.arctan(thetaN/thetaD) unparametro = {'r':r, 'gamma':gamma, 'beta':beta, 'theta':theta} return (unparametro) # Terminos cuadraticos parametros = [] # denominador cuadratico if (rcompleja>0 and len(Q_raizRe)>0): # fracciones parciales modificadas Xzz = (P/Q)/z Xzm = Xzz.apart() # fracciones parciales restaurada terminos = Xzm.args Xzp = 0*z for untermino in terminos: Xzp = Xzp + untermino*z unparam = parametro_cuadratico(untermino*z) if len(unparam)>0: parametros.append(unparam) if (rcompleja>0 and len(Q_raizRe)==0): Xzp = P/Q parametros.append(parametro_cuadratico(P/Q)) # SALIDA print('\n Hz:') sym.pprint(Xz) if (len(Q_raizRe)>0): print('\n Hz/z:') sym.pprint(Xzz) print('\n Hz/z.apart:') sym.pprint(Xzm) print('\n Hz = (Hz/z)*z') sym.pprint(Xzp) print('\n polos: ', Q_raiz) print('\n polos Re: ', Q_raizRe) if len(parametros)>0: for unparam in parametros: print('parametros cuadraticos: ') for cadauno in unparam.keys(): print(cadauno,'\t',unparam[cadauno]) # grafica plano z imaginario figura, grafROC = plt.subplots() # limite radio1 = plt.Circle((0,0),1,color='lightgreen', fill=True) radio2 = plt.Circle((0,0),1,linestyle='dashed', color='lightgreen',fill=False) grafROC.add_patch(radio1) for raiz in Q_raiz.keys(): [r_real,r_imag] = raiz.as_real_imag() radio_raiz = np.abs(raiz) nROC = plt.Circle((0,0),radio_raiz, color='red',fill=True) grafROC.add_patch(nROC) grafROC.add_patch(radio2) # borde r=1 grafROC.axis('equal') # marcas de r=1 y valor a for raiz in Q_raiz.keys(): [r_real,r_imag] = raiz.as_real_imag() grafROC.plot(r_real,r_imag,'o',color='orange', label ='polo:'+str(float(raiz))+';'+str(Q_raiz[raiz])) grafROC.plot(1,0,'o',color='green', label ='radio:'+str(1)) plt.axhline(0,color='grey') plt.axvline(0,color='grey') plt.grid() plt.legend() plt.xlabel('Re[z]') plt.ylabel('Imag[z]') untitulo = 'ROC H[z]='+str(Xz) plt.title(untitulo) # h[n] usando tabla de transformadas m = 10 n = sym.Symbol('n') hn = 0.5833*((0.7)**n)*sym.Heaviside(n)+0.4166*((-0.5)**n)*sym.Heaviside(n) fn = sym.lambdify(n,hn) ki = np.arange(0,m,1) xnk = fn(ki) # grafica h[n] figura, grafxn = plt.subplots() plt.stem(ki,xnk) plt.xlabel('ki') plt.ylabel('h[n]') plt.title('h[n]= '+str(hn)) plt.show()
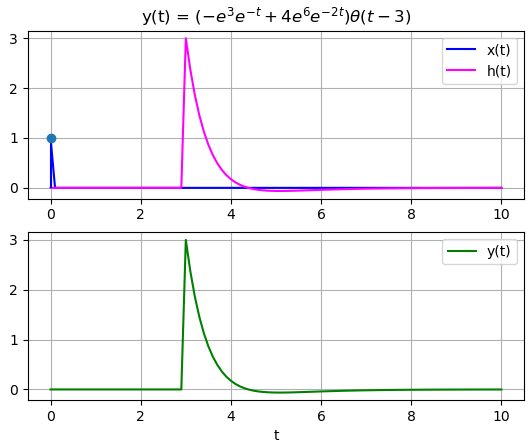
literal b. La respuesta de paso s[n]
La señal de entrada será x[n] = μ[n], con transformada z de:
X[z] = \frac{z}{z-1}b.1 Y[z] ante entrada X[z] y con función de transferencia H[z]
Usando el resultado de la respuesta al impulso,
H[z] = \frac{-z}{z-1/4}+ \frac{2z}{z-1/2}La salida Y[n] del sistema será:
Y[z] = X[z] H[z] = \frac{z}{z-1} \Bigg[ \frac{-z}{z-1/4} + \frac{2z}{z-1/2} \Bigg]b.2 Y[z] en fracciones parciales
Fracciones parciales modificadas
\frac{Y[z]}{z} = \frac{1}{z-1} \Bigg[ \frac{-z}{z-1/4} + \frac{2z}{z-1/2} \Bigg] \frac{Y[z]}{z} = \frac{1}{(z-1)} \frac{-z}{z-1/4} + \frac{1}{(z-1)}\frac{2z}{z-1/2}La expresión se puede operar por partes:
\frac{-z}{(z-1)(z-1/4)} = \frac{k_1}{z-1} + \frac{k_2}{z-1/4} k_1 = \frac{-z}{\cancel{(z-1)}(z-1/4)} \Big|_{z=1} = \frac{-1}{(1-1/4)}=-\frac{4}{3} k_2 = \frac{-z}{(z-1)\cancel{(z-1/4)}} \Big|_{z=1/4} = \frac{-1/4}{(1/4-1)} = \frac{1}{3}y la segunda parte,
\frac{2z}{(z-1)(z-1/2)} = \frac{k_3}{z-1} + \frac{k_4}{z-1/2} k_3 = \frac{2z}{\cancel{(z-1)}(z-1/2)} \Big|_{z=1} = \frac{2(1)}{1-1/2} = 4 k_4 = \frac{2z}{(z-1)\cancel{(z-1/2)}} \Big|_{z=1/2} = \frac{2(1/2)}{1/2-1} = -2Uniendo las partes de fracciones parciales modificadas se tiene:
\frac{Y[z]}{z} = \frac{-4/3}{z-1} + \frac{1/3}{z-1/4} + \frac{4}{z-1}+\frac{-2}{z-1/2}restaurando las fraciones parciales
Y[z] = \frac{8}{3}\frac{z}{z-1} + \frac{1}{3}\frac{z}{z-1/4} -2\frac{z}{z-1/2}Usando la tabla de transformadas z
y[n] = \frac{8}{3}\mu [n] + \frac{1}{3}\Big( \frac{1}{4}\Big)^n \mu [n] -2 \Big(\frac{1}{2}\Big) ^n \mu[n]Usando el algoritmo en Python, se tiene:
Yz:
3
z
----------------------------
(z - 1)*(z - 0.5)*(z - 0.25)
Yz/z:
2
z
----------------------------------
3 2
1.0*z - 1.75*z + 0.875*z - 0.125
Yz/z.apart:
0.333333333333333 2.0 2.66666666666667
----------------- - ----------- + ----------------
1.0*z - 0.25 1.0*z - 0.5 z - 1
Yz = (Yz/z)*z
0.333333333333333*z 2.0*z 2.66666666666667*z
------------------- - ----------- + ------------------
1.0*z - 0.25 1.0*z - 0.5 z - 1
polos: {0.2500: 1, 0.5000: 1, 1.0000: 1}
gráfica de salida y[n]