3ra Evaluación 2024-2025 PAO I. 17/Septiembre/2024
Tema 2. (30 puntos)
Para el salto del Bungee del ejercicio del tema anterior se toman lecturas con un sensor de velocidad sujetado a la persona.
De la tabla de datos obtenida, se observa que los tamaños de paso en tiempo no siempre son equidistantes.
Se requiere encontrar un polinomio interpolación de al menos grado 3.
datos usando h=1/8
ti
vi
0
0.0000
0.25
2.4479
0.5
4.8849
0.75
7.3001
1
9.6832
1.375
13.1763
1.75
16.5451
2.125
19.7641
2.4
22.0193
2.55
23.2075
a. Describa el planteamiento del ejercicio, selección de puntos, expresiones usando el método de Lagrange.
b. Resuelva el sistema usando los algoritmos correspondientes.
c. Presente el polinomio obtenido, simplificado y grafique verificando que P(x) pase por los puntos de muestra.
d. Use el resultado P(x) para estimar el error con los valores de vi que no fueron usados para la interpolación.
e. Adjunte los archivos para algoritmo.py, resultados.txt y grafica.png
Rúbrica: literal a (10 puntos), literal b (5 puntos), literal c (5 puntos), literal d (5 puntos), literal e (5 puntos)
Tema 3 (30 puntos) El acelerado crecimiento de la población de mayor edad tendrá un fuerte impacto en los gastos futuros del Instituto de Seguridad Social (IESS), una entidad a la que actualmente (2024) no le alcanzan sus ingresos para pagar las pensiones a sus jubilados y otros rubros. [1]
Un motivo a considerar, podría ser la caída de la natalidad es un fenómeno generalizado en los países desarrollados que tienen tasa de hijos por mujer en edad fértil por debajo de la tasa de reemplazo poblacional de 2.1
Ejemplos de estos casos son Corea del Sur, Japón y China [2,3], países donde la cantidad de personas que trabajan y aportan al seguro social tiende a ser cada vez menor respecto a los pensionistas (jubilados).
Para el caso de Ecuador a fin de realizar un análisis preliminar, se requiere disponer de un modelo matemático que permita estimar cuando ser alcanzaría esta tasa de natalidad.
Promedio Hijos por mujer en Ecuador. INEC 29 Agosto 2019 [4]
tasa
7.32
6.39
5.58
4.89
4.31
3.85
3.50
3.26
3.03
2.79
2.54
2.35
año
1965
1970
1975
1980
1985
1990
1995
2000
2005
2010
2015
2020
k
0
1
2
3
4
5
6
7
8
9
10
11
Realice un modelo de interpolación polinómica usando los datos de los años 1965, 1980, 1995 y 2010.
a. Describa el planteamiento del ejercicio, justificando el grado del polinomio seleccionado
b. Realice el del sistema de ecuaciones en su forma matricial y muestre la matriz aumentada
c. Resuelva el sistema usando los algoritmos correspondientes.
d. Presente el polinomio obtenido y grafique verificando que P(x) pase por los puntos de muestra.
e. Use el resultado P(x) para estimar la tasa de hijos por mujer para el año 2020 y calcule el error.
f. Estime el año en que se alcanza la tasa mínima de reemplazo de 2.1
Adjunte los archivos de resultados, algoritmos y gráficas realizados para el ejercicio
Rúbrica: literal a (5 puntos), literal b (5 puntos), literal c (5 puntos), literal d (5 puntos), literal e (5 puntos) ), literal f (5 puntos).
Referencia: [1] IESS: Envejecimiento de la población disparará gastos; Peña plantea subir aportes. Primicias.ec: 3 Marzo 2024. https://www.primicias.ec/noticias/economia/envejecimiento-poblacion-iess-aportes/
[2] «Emergencia nacional» en Corea del Sur: por qué las mujeres surcoreanas no están teniendo hijos. BBC News Mundo. 30 marzo 2024.
[3] Por qué China amplió a 3 el número de hijos que pueden tener las parejas. BBC News Mundo. 4 junio 2021.
https://www.youtube.com/watch?v=8kErwjPKwjY .
[4] 5 datos sobre población del Ecuador. INEC Ecuador. 29 Agosto 2019. Min 0:45 https://www.youtube.com/watch?v=wjTZNfykmZU [5] ¿Por qué los PAÍSES RICOS se enfrentan al COLAPSO DEMOGRÁFICO? VisualEconomik. 11 Octubre 2022.
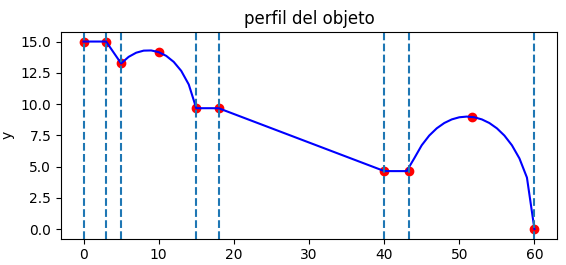
Tema 2 (30 puntos) Las medidas del perfil de un objeto se describen por medio de los siguientes puntos:
xi
0
3
5
9.985
14.97
17.97
40.04
43.29
51.64560
60
yi
15
15
13.25
14.155
9.676
9.676
4.64
4.64
8.976
0
a. Plantee el o los polinomios de interpolación P(x) que describan el perfil del objeto en el intervalo
[0, 14.97] . Justifique la selección del método de interpolación polinómica.
b. Desarrolle los polinomios planteados de forma analítica.
c. Estime el mayor error sobre el o los datos en el intervalo [5, 9.985]. Use como referencia la ecuación del círculo del tema anterior.
d. Escriba sus conclusiones y recomendaciones sobre los resultados obtenidos. Adjunte los archivos realizados como algoritmos.py, resultados.txt y gráficas.png
Rúbrica: literal a (9 puntos), literal b (12 puntos), literal c (6 puntos), literal d (3 puntos)
1ra Evaluación 2023-2024 PAO II. 21/Noviembre/2023
Tema 3. (30 puntos) Por medio del acelerómetro o sensor de fuerzas g de un avión se acrobacias se obtienen datos cada 5 segundos.
t
0
5
10
15
20
25
30
35
40
45
50
Aceleración (G)
1
1.2
1.3
2.5
4.5
3.2
1.4
0.0
-0.9
-1.0
0.2
Para un estudio detallados de la acrobacia realizada se requiere disponer de datos cada segundo
usando interpolación polinómica con el método de Lagrange.
a. Plantear el ejercicio describiendo los criterios a usar para el o los polinomios para el eje y.
b. Desarrolle el método sobre los puntos seleccionados con las expresiones completas desarrolladas con el algoritmo.
c. Presentar el polinomio resultante y la gráfica usando la resolución requerida para el estudio.
d. Encuentre el error obtenido entre el polinomio y el o los puntos de prueba de los datos no usados para generar el polinomio.
e. Adjunte los archivos: algoritmos.py, resultados.txt y gráfica.png del polinomio.
t = [0,5,10,15,20,25,30,35,40,45,50]
G = [1,1.2,1.3,2.5,4.5,3.2,1.4,0.0,-0.9,-1.0,0.2]
Rúbrica: literal a (5 puntos), literal b (10 puntos), literal c (5 puntos), literal d (5 puntos), literal e (5 puntos).
Referencias: [1] VUELO ACROBÁTICO. TDP Club. RTVE. 30 enero 2020
[2] High intensity aerobatic flying with C.J. Wilson and Kirby Chambliss. Red Bull. 6 mar 2014.
1ra Evaluación 2023-2024 PAO II. 21/Noviembre/2023
Tema 2. (40 puntos) El DPS (Dynamic Positioning System) controla automáticamente la posición y el rumbo de un barco usando propulsión activa mediante un ordenador y una variedad de sistemas y funciones.
En el caso de entradas a puertos comerciales de alto tráfico y limitado espacio se convierten el una herramienta indispensable para gestionar las recorridos de ingreso o salida.
Suponga que como primer paso para planificar una ruta de un barco de contenedores, minimizando el gasto de energía usando la inercia del barco se planifica una ruta siguiendo los puntos de marca indicados en la tabla.
Puntos referenciales para la ruta
x
0.1
2.0
4.0
5.0
7.0
y
1.0
8.0
0.0
-1.0
3.0
a. Plantee el ejercicio usando un polinomio de interpolación y un sistema de ecuaciones.
b. Establezca la forma matricial del sistema de ecuaciones (Vandermonde) y como matriz aumentada
c. De ser necesario realice el pivoteo parcial por filas
d. Use el método directo Gauss, desarrolle todas las expresiones de las operaciones que realiza el algoritmo numérico. Estime la tolerancia y justifique.
e. Comente sobre la convergencia del método si usara un método iterativo. (número de condición)
f. Adjunte los archivos: algoritmos.py, resultados.txt y gráfica.png del polinomio.
x = [0.1,2.0,4.0,5.0,7.0]
y = [1.0,8.0,0.0,-1.0,3.0]
Rúbrica: literal a (5 puntos), literal b (5 puntos), literal c (5 puntos), literal d (15 puntos), literal e (5 puntos), literal f (5 puntos).
Referencia: [1] Gigante buque ingresa a las terminales portuarias de Guayaquil. El Universo. 18 Ene 2020. https://youtu.be/X5S9x53Z_mY?
[2] Reportan congestión de buques de carga en puertos de EE.UU. Noticias Telemundo. 22 sept 2021.
[3] Colisiones y errores de barcos jamás capturados en cámara. 21 oct 2023.
Tema 3. (20 puntos) Continuando con el ejercicio del área devastada por el incendio, con el objetivo de simplificar el registro de datos se propone describir los perfiles usando polinomios.
Frontera superior
X
350
300
350
420
444
484
504
534
568
620
660
720
780
740
800
800
Y
0
315
315
315
320
336
400
415
462
510
550
550
490
390
390
150
Frontera inferior
X
350
459
666
800
Y
0
63
130
150
a. Plantear el ejercicio para realizar interpolación polinómica. Describa criterios, intervalos, método.
b. Desarrolle el o los polinomios para la frontera superior, siguiendo el método propuesto en el literal a.
c. Desarrolle el o los polinomios para la frontera inferior, con un método diferente al literal a.
d. Usando un algoritmo, graficar al menos un resultado del literal b y c.
Rúbrica: literal a (5 puntos), literal b (5 puntos), literal c (5 puntos), literal d (5 puntos)
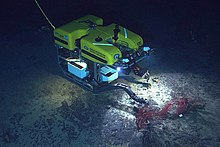
Tema 3 (35 puntos) Suponga que se requiere planificar la operación de recolección de restos del accidente del sumergible ocurrido en junio del 2023 usando un robot autónomo sumergible.
Existen limitaciones debidas a la profundidad del lecho submarino, las fuertes corrientes que fluyen desde el oeste, limitada energía en las baterías del robot, etc.
El recorrido del robot se puede programar usando un polinomio para el intervalo de las coordenadas presentadas.
Se estima poder realizar tan solo dos recorridos desde el oeste hacia el este.
a. Plantee el ejercicio usando interpolación polinómica para realizar un recorrido para la recolección de restos, describiendo los criterios usados para la selección de los puntos.
b. Desarrolle un primer polinomio usando el método de diferencias divididas de Newton
c. Excluyendo los puntos usados en el literal anterior, desarrolle otro polinomio usando el método de Lagrange.
d. Grafique los resultados obtenidos para cada caso.
e. Determine el error de cada polinomio como la distancia entre cada punto por el que no pasa el polinomio y la coordenada equivalente en el polinomio. Realice observaciones a los resultados.
Nota: Los valores de la tabla se establecen para el ejercicio y no corresponden a una referencia publicada.
Rúbrica: literal a (5 puntos), literal b (10 puntos), literal c (10 puntos), literal d (5 puntos), literal e (5 puntos)
Referencia: [1] La Guardia Costera de EE.UU. anuncia una investigación oficial sobre la implosión del sumergible Titán. RTVE.es / EFE. 26.06.2023 https://www.rtve.es/noticias/20230626/eeuu-anuncia-investigacion-oficial-sumergible-titan/2450440.shtml
[2] Así será la recuperación de los restos del sumergible Titán, según un experto militar. CNN en Español. 23 jun 2023.
Tema 1. (25 puntos) En enero del 2023 se detectó un globo aerostático supuestamente espía sobre el territorio soberano de un país, que sobrevoló a 18 Km de altura en la estratosfera y que «no representaba ningún riesgo militar o físico los ciudadanos en la superficie».
Otro país vecino al mismo tiempo hacía seguimiento a otro «posible segundo incidente», se anunció en los medios de comunicación. En el primer caso se decidió no destruir el aparato por el temor de que la caída de sus escombros podría haber sido peligrosa para la superficie y no representaba el globo un peligro inmediato.
Como seguimiento al caso, se requiere describir la trayectoria del globo mediante ecuaciones a partir de las coordenadas de avistamiento reportadas por civiles.
a. Plantear el ejercicio, describiendo los criterios, método numérico, segmentos a usar en las ecuaciones para realizar la interpolación polinómica de Lagrange.
minimizando oscilaciones del polinomio que puedan resultar en interpretaciones erradas.
b. Realizar el desarrollo analítico de las ecuaciones planteadas y presente el polinomio simplificado.
c. Validar los resultados usando el algoritmo, adjunte los archivos.py, resultados.txt, gráfica.png
Rúbrica: literal a (5 puntos), literal b (10 puntos), literal c (10 puntos)
1ra Evaluación 2022-2023 PAO II. 22/Noviembre/2022
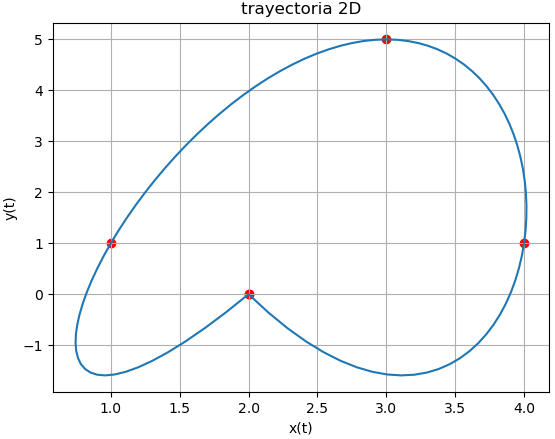
Tema 3. (30 puntos) La simulación de drones consiste en modelar el comportamiento de un dron o vehículo aéreo no tripulado (VANT) y evaluar su rendimiento en un entorno virtual.
La simulación es un paso importante en el desarrollo de drones y permite comprender la dinámica de los drones antes de fabricar los prototipos.
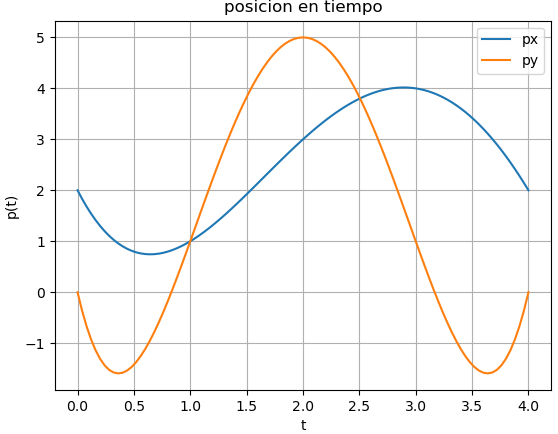
Para un ejemplo simplificado en 2D, se requiere obtener una trayectoria simulada por polinomios para el dron pase por las marcas de tiempo y su coordenada mostrada.
3ra Evaluación 2022-2023 PAO I. 13/Septiembre/2022
Tema 2. (30 puntos) Una persona al recorrer un sendero de ascenso a una montaña, registra en la tabla mostrada, la distancia horizontal desde el punto de partida y la altura del nivel del mar.
Para resumir los datos del perfil de elevación en el sendero en la montaña, se prefiere una descripción mediante un polinomio de interpolación.
a) Plantear el o los polinomios de interpolación para las muestras presentadas para todo el intervalo de la tabla. Indique los criterios usados para el grado del polinomio y los puntos seleccionados que minimicen las distorsiones posibles por el grado polinomio.
b) Desarrolle las expresiones para los polinomios usando el método de Lagrange. (al menos dos polinomios)
c) Determine el error para el polinomio planteado sobre los datos.
d) Adjunte el desarrollo del ejercicio realizado con el algoritmo en Python.
Recorrido (Km)
0,0
1,0
2,0
3,0
4,0
5,0
6,2
7,0
8,0
9,0
10,0
11,0
Altura (m)
4315
4447
4559
4692
4884
5201
5366
5310
5249
5175
5034
4787
Rúbrica: Literal a. criterios (6 puntos), literal b, (12 puntos), literal c (5 puntos), literal d (5 puntos)