2da Evaluación II Término 2016-2017. 16/Febrero/2017. TELG1001
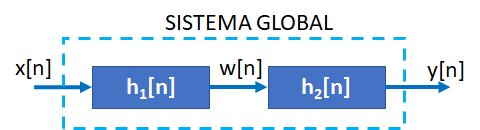
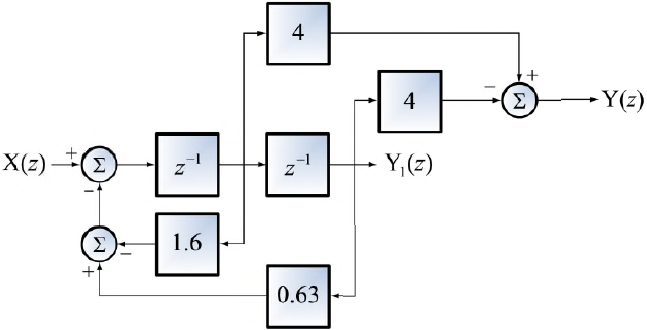
Tema 3. (28 puntos) Dos sistemas LTI-DT causales, tienen respuesta impulso h1[n] y h2[n] respectivamente. Los sistema en referencia, utilizados como subsistemas, son conectados en cascada con la finalidad de conformar un sistema global, tal como se muestra en la siguiente figura.
Las ecuaciones de diferencia que relacionan a cada sistema y al global son las siguientes:
2da Evaluación II Término 2016-2017. 16/Febrero/2017. TELG1001
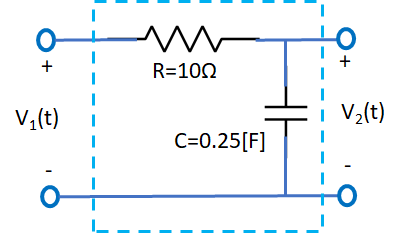
Tema 2. (28 puntos) Para el circuito eléctrico que se muestra en la siguiente figura:
a. Determinar su función de transferencia.
b. Determinar, esquematizar y etiquetar su respuesta de frecuencia, indicando a que tipo de filtro no ideal de frecuencias selectivas se podría asociar su comportamiento.
c. Obtener la respuesta impulso h(t) que representa el circuito eléctrico.
d. Determinar la respuesta v2(t) que se obtiene a la salida de dicho sistema cuando es exitado con una señal v1(t) = sen(50t) [V]. ¿Qué se puede decir acerca de si el sistema transmite co distorsión o sin distorsión? Justifique su respuesta de manera razonada.
2da Evaluación II Término 2016-2017. 16/Febrero/2017. TELG1001
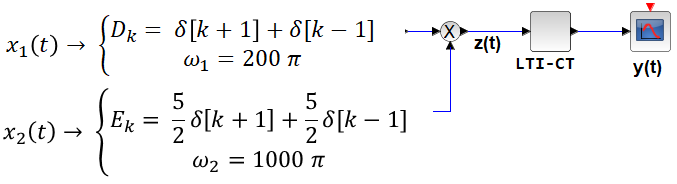
Tema 1. (28 puntos) La señal z(t) a la salida de un multiplicador se aplica como señal de entrada o excitación a un filtro ideal de frecuencias selectivas, tal como se muestra en la siguiente figura.
a. Determinar, esquematizar y etiquetar el espectro de la transformada de Fourier de z(t), es decir Z(ω) vs ω.
b. Diseñar un filtro ideal de paso alto (HPF), indicando las características que debería tener dicho filtro para que a su salida se pueda obtener como respuesta la señal y(t) = 4cos(1200πt). Determine la relación Py(t)/Px(t).
c. Usando propiedades de la transformada de Fourier, obtener la respuesta impulso h(t) de dicho filtro de paso alto.
strong>Nota: cuando se produzca el siguiente error con Numpy para evaluar una expresión con exponente negativo,
Traceback (most recent call last):
File "D:\MATG1052Ejemplos\Transformadaz\ejercicio....py", line 93, in
fi = f_n(ki)
File "", line 2, in _lambdifygenerated
return (9/59)*4**(-n)*Heaviside(n, 1/2)
ValueError: Integers to negative integer powers are not allowed.
proceda actualizando los valores a evaluar como tipo real (dtype float), tan solo usando en la línea de ki con lo siguiente:
ki = np.arange(0,muestras_fn,1.0)
quedando las instrucciones de la siguiente forma, que si evalua valores para realizar gráficas.
# Transformada z- Fracciones parciales# https://blog.espol.edu.ec/telg1001/lti-dt-transformada-z-xz-fracciones-parciales-con-python/import numpy as np
import sympy as sym
import matplotlib.pyplot as plt
import telg1001 as fcnm
#sym.SYMPY_DEBUG=True# INGRESO
z = sym.Symbol('z')
n = sym.Symbol('n', real=True)
# coeficientes como racional en dominio 'ZZ' enteros
a0 = sym.Rational(3,4)
a1 = sym.Rational(1,8)
Pz = z**2
Qz = z**2-a0*z+a1
#Pz = z*z**2#Qz = (z-1)*(z**2-(a0)*z+a1)
F = Pz/Qz
# para graficar
f_nombre = 'H'# nombre de función[z]: H,X,Y, etc
muestras_fn = 10 # muestras para f[n]# PROCEDIMIENTO
Fz = fcnm.apart_z(F)
Fz_factor = sym.factor(F.evalf())
Fz_factor = fcnm._round_float_is_int(Fz_factor)
# polos y ceros de Hz
[P,Q] = Fz.as_numer_denom()
P = sym.poly(P,z)
Q = sym.poly(Q,z)
P_ceros = sym.roots(P)
Q_polos = sym.roots(Q)
estable_z = fcnm.estabilidad_asintotica_z(Q_polos)
# Inversa de transformada z
fn = 0*n ; Fz_revisar = [] ; Qz2_term =[]
term_sum = sym.Add.make_args(Fz)
for term_k in term_sum:
term_kn = fcnm.inverse_z_transform(term_k,z,n)
iftype(term_kn)==tuple:
fn = fn + term_kn[0]
elif term_kn isnotNone:
fn = fn + term_kn
elif term_kn isNone:
f_noeval = f_noeval + term_k
Qz2 = fcnm.Q_cuad_z_parametros(term_k)
if Qz2:
Qz2_term.append(Qz2)
fn = fn.collect(sym.Heaviside(n))
fn = fn.collect(sym.DiracDelta(n))
fn = fcnm._round_float_is_int(fn)
# SALIDAprint('\n '+f_nombre+'z:')
sym.pprint(F)
print('\n '+f_nombre+'z en fracciones parciales')
sym.pprint(Fz)
print('\n '+f_nombre+'z en factores')
sym.pprint(Fz_factor)
print('\n {Q_polos:veces}:',Q_polos)
print(' {P_ceros:veces}:',P_ceros)
iflen(Qz2_term)>0:
print('\nparametros cuadraticos: ')
for i inrange(0,len(Qz2_term),1):
for unterm in Qz2_term[i]:
print(' termino:',unterm)
fcnm.print_resultado_dict(Qz2_term[i][unterm])
print('\nestabilidad asintótica en z:')
fcnm.print_resultado_dict(estable_z)
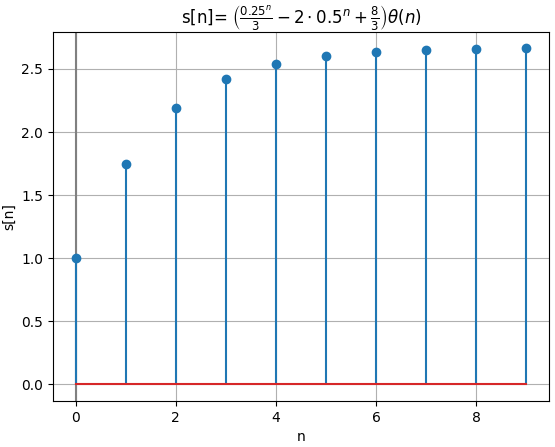
print('\n '+f_nombre.lower()+'[n]:')
sym.pprint(fn)
iflen(Fz_revisar)>0:
print('revisar terminos sin transformada de tabla:')
for un_term in Fz_revisar:
print(un_term)
# # GRAFICA -----------
fig_ROC = fcnm.graficar_Fz_polos(Fz_factor,Q_polos,P_ceros,
muestras=101,f_nombre=f_nombre)
fig_Fz = fcnm.graficar_Fs(Fz_factor,Q_polos,P_ceros,
muestras=101,
f_nombre=f_nombre)
# graficar f[n] -------
f_n = sym.lambdify(n,fn.expand(),modules=fcnm.equivalentes)
ki = np.arange(0,muestras_fn,1.0)
fi = f_n(ki)
print('\nseñal discreta '+f_nombre.lower()+'[n]')
print('n :',ki)
print(f_nombre.lower()+'[n]:',fi)
# graficar f[n]
fig_fn, grafxn = plt.subplots()
plt.axvline(0,color='grey')
plt.stem(ki,fi)
plt.grid()
plt.xlabel('n')
plt.ylabel(f_nombre.lower()+'[n]')
etiqueta = r''+f_nombre.lower()+'[n]= $'+str(sym.latex(fn))+'$'
plt.title(etiqueta)
plt.show()
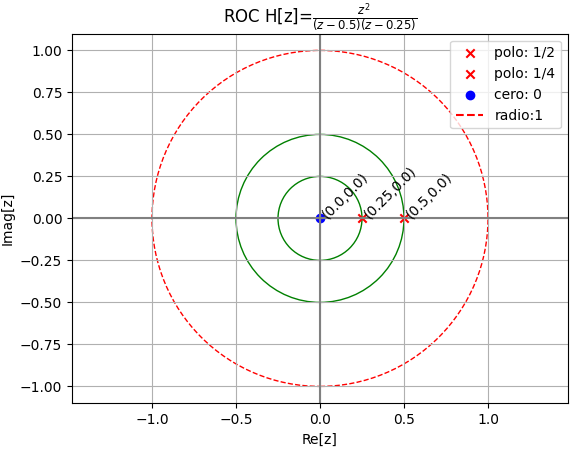
Literal c
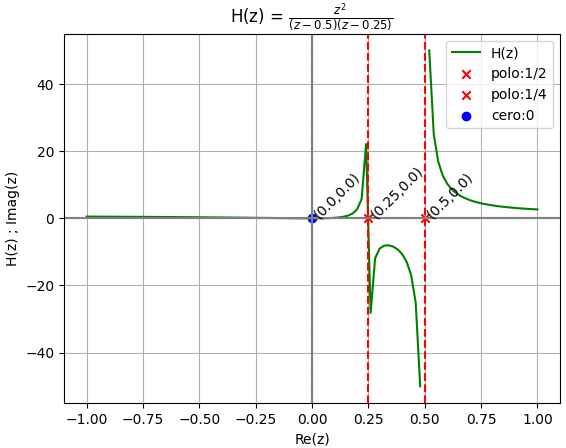
revisando los polos y ceros:
ceros : z = 0 y z = 0
polos: z=1/4 y z=1/2
Dado que todos los polos se encuentran dentro del círculo de radio unitario , el sistema es asintóticamente estable, por lo que es BIBO o EASA estable
En la salida, existe un factor de atenuación de 0.04 y un retardo de 87.70°.
Como la señal de entrada se reproduce de manera exacta en su salida a pesar tener amplitud diferente y un retardo en el tiempo.
2da Evaluación II Término 2012-2013. 31/Enero/2013. TELG1001
Tema 3. (35 puntos) Considerar la existencia del sistema mostrado en la siguiente figura, donde el espectro de Fourier de la respuesta impulso h(t) es H(ω).
a. Determinar, esquematizar y etiquetar el espectro de Fourier de x(t), es decir X(ω) vs ω.
b. Determinar la expresión analítica de q(t), como una función de x(t).
c. Determinar, esquematizar y etiquetar los espectros de Fourier de las señales g(t), p(t) y q(t), es decir G(ω), P(ω) y Q(ω) respectivamente.
d. Determinar, esquematizar y etiquetar el espectro de Fourier de y(t), es decir Y(ω) vs ω.
e. Expresar la salida y(t) como una función de x(t).
f. Hallar la energía de la señal de salida y(t), es decir Ey(t).
2da Evaluación II Término 2012-2013. 31/Enero/2013. TELG1001
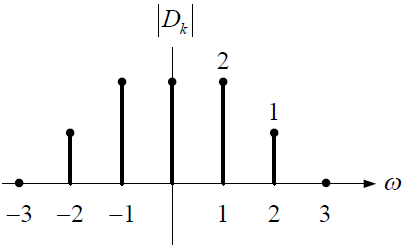
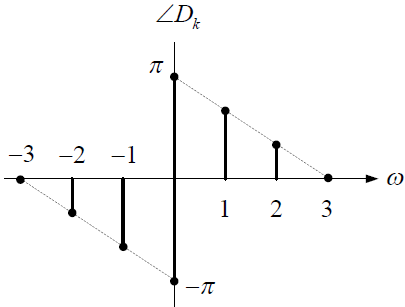
Tema 2. (20 puntos) La siguiente figura muestra el espectro de los coeficientes complejos exponenciales de la serie de Fourier de una señal periódica x(t)
a. Por simple inspección, determine las Series de Fourier complejas exponenciales que representan a x(t)
b. Por simple inspección, esquematice adecuadamente el espectro de los coeficientes de Fourier para la representación armónica (trigonometría compacta).
c. Mediante la aplicación del Teorema de Parseval, determinar la potencia de la señal periódica x(t).