Ejercicio: 1Eva_2022PAOII_T1 Esfera flotando en agua
Según el principio de Arquímedes, la fuerza de flotación o empuje es igual al peso de el fluido desplazado por la porción sumergida de un objeto.
F_{empuje} = F_{peso} \rho_{agua} V_{sumergido} \text{ } g = \rho_{esfera}V_{esfera} \text{ } g V_{sumergido} = \frac{\rho_{esfera}}{\rho_{agua}}V_{esfera} V_{esfera} - V_{sobreagua} = \frac{\rho_{esfera}}{\rho_{agua}}V_{esfera} V_{sobreagua} = \Big( 1- \frac{\rho_{esfera}}{\rho_{agua}}\Big) V_{esfera} V_{esfera} = \frac{4}{3}\pi r^3 \frac{\pi h^2}{3}(3r-h) = \Big( 1- \frac{\rho_{esfera}}{\rho_{agua}}\Big) \frac{4}{3}\pi r^3 h^2(3r-h) = \Big( 1- \frac{\rho_{esfera}}{\rho_{agua}}\Big) 4 r^3El planteamiento para la búsqueda de raíces es f(x) = 0, que para este caso será:
f(h) = h^2(3r-h) - \Big( 1 - \frac{\rho_{esfera}}{\rho_{agua}}\Big) 4 r^3 = 0usando los valores dados para el ejercicio, r=1 y ρesfera = 200 Kg/m3 y ρagua = 1000 kg/m3 se tiene que:
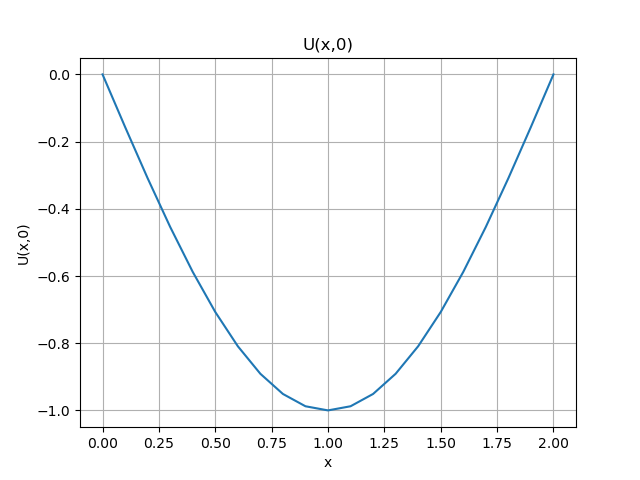
f(h) = h^2(3-h) - \Big( 1 - \frac{200}{1000}\Big) 4 f(h) = h^2(3-h) - \frac{16}{5}Se observa la gráfica de f(h) en el intervalo de h entre[0,2] interpretado como totalmente sumergida y totalmente flotando sobre el agua, confirmando que existe una raíz

Para el caso de aplicar el método del punto fijo se plantea que x=g(x),
h = g(h) h^2(3-h) = \frac{16}{5}con lo que se puede plantear dos ecuaciones al despejar h
h = \sqrt{ \frac{16}{5(3-h)}} h = 3-\frac{16}{5 h^2}Iteraciones de la primera ecuación
itera = 0 ; h = h0 = 0.5 ;
g(h) = \sqrt{ \frac{16}{5(3-0.5)}} = 1.1313 tramo = |1.1313-0.5|=0.6313itera = 1 ; h = 1.1313 ;
g(h) = \sqrt{ \frac{16}{5(3-1.1313)}} = 1.3086 tramo = |1.3086-1.1313| = 0.1772itera = 2 ; h = 1.3086 ;
g(h) = \sqrt{ \frac{16}{5(3-1.3086)}} = 1.3754 tramo = |1.3754-1.3086| = 0.0668Observando los errores o tramos en cada iteración se tiene que se reduce, el método converge.
resultados.txt
x,g(x),tramo 0.5 1.131370849898476 0.631370849898476 1.131370849898476 1.308619626317284 0.17724877641880799 1.308619626317284 1.3754802083033437 0.06686058198605971 1.3754802083033437 1.4035002223557855 0.02802001405244181 1.4035002223557855 1.4157629993958152 0.012262777040029649 1.4157629993958152 1.4212317895316 0.005468790135784829 1.4212317895316 1.4236912066694054 0.0024594171378053975 1.4236912066694054 1.424801422465215 0.0011102157958096104 1.424801422465215 1.4253034412081806 0.0005020187429656264 raiz: 1.4253034412081806

Algoritmo en Python
# Algoritmo de punto fijo # [a,b] intervalo de búsqueda # error = tolera import numpy as np import matplotlib.pyplot as plt def puntofijo(gx,a,tolera, iteramax = 15): i = 1 # iteración b = gx(a) tramo = abs(b-a) print('x,g(x),tramo') print(a,b,tramo) while(tramo>=tolera and i<=iteramax ): a = b b = gx(a) tramo = abs(b-a) print(a,b,tramo) i = i + 1 respuesta = b # Validar respuesta if (i>=iteramax ): respuesta = np.nan return(respuesta) # PROGRAMA --------- # INGRESO fx = lambda h: h**2*(3-h)-16/5 gx = lambda h: np.sqrt(16/(5*(3-h))) #fx = lambda h: h**2*(3-h)-16/5 #gx = lambda h: 3-16/(5*(h**2)) x0 = 0.5 tolera = 0.001 iteramax = 50 # itera máximo a = 0 # intervalo b = 2 muestras = 51 # gráfico # PROCEDIMIENTO respuesta = puntofijo(gx,x0,tolera) # SALIDA print('raiz:',respuesta) hi = np.linspace(a,b,muestras) fi = fx(hi) gi = gx(hi) plt.plot(hi,fi,label='f(h)') plt.plot(hi,gi,label='g(h)') plt.plot(hi,hi,label='Identidad') plt.axhline(0,color='grey') plt.grid() plt.xlabel('h') plt.ylabel('f(h)') plt.title('esfera sumergida') plt.legend() plt.show()