
Ejercicio: 2Eva_IT2019_T2 Péndulo vertical
Para resolver la ecuación usando Runge-Kutta se estandariza la ecuación a la forma:
\frac{d^2\theta }{dt^2}+\frac{g}{L}\sin (\theta)=0 \frac{d^2\theta }{dt^2}= -\frac{g}{L}\sin (\theta)Se simplifica su forma a:
\frac{d\theta}{dt}=z = f_t(t,\theta,z) \frac{d^2\theta }{dt^2}= z' =-\frac{g}{L}\sin (\theta) = g_t(t,\theta,z)y se usan los valores iniciales para iniciar la tabla:
\theta(0) = \frac{\pi}{6} \theta '(0) = 0| ti | θ(ti) | θ'(ti)=z |
| 0 | π/6 = 0.5235 | 0 |
| 0.2 | 0.3602 | -1.6333 |
| 0.4 | -0.0815 | -2.2639 |
| … |
para las iteraciones se usan los valores (-g/L) = (-9.8/0.6)
Iteración 1: ti = 0 ; yi = π/6 ; zi = 0
K1y = h * ft(ti,yi,zi)
= 0.2*(0) = 0
K1z = h * gt(ti,yi,zi)
= 0.2*(-9.8/0.6)*sin(π/6) = -1.6333
K2y = h * ft(ti+h, yi + K1y, zi + K1z)
= 0.2*(0-1.6333)= -0.3266
K2z = h * gt(ti+h, yi + K1y, zi + K1z)
= 0.2*(-9.8/0.6)*sin(π/6+0) = -1.6333
yi = yi + (K1y+K2y)/2
= π/6+ (0+(-0.3266))/2 = 0.3602
zi = zi + (K1z+K2z)/2
= 0+(-1.6333-1.6333)/2 = -1.6333
ti = ti + h = 0 + 0.2 = 0.2
estimado[i] = [0.2,0.3602,-1.6333]
Iteración 2: ti = 0.2 ; yi = 0.3602 ; zi = -1.6333
K1y = 0.2*( -1.6333) = -0.3266
K1z = 0.2*(-9.8/0.6)*sin(0.3602) = -1.1515
K2y = 0.2*(-1.6333-0.3266)= -0.5569
K2z = 0.2*(-9.8/0.6)*sin(0.3602-0.3266) = -0.1097
yi = 0.3602 + ( -0.3266 + (-0.3919))/2 = -0.0815
zi = -1.6333+(-1.151-0.1097)/2 = -2.2639
ti = ti + h = 0.2 + 0.2 = 0.4
estimado[i] = [0.4,-0.0815,-2.2639]
Se continúan con las iteraciones, hasta completar la tabla.
Tarea: realizar la Iteración 3
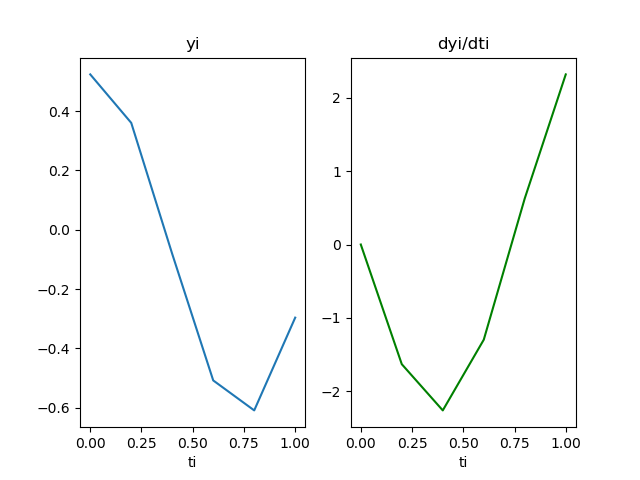
Usando el algoritmo RungeKutta_fg se obtienen los valores y luego la gráfica
[ t, y, dyi/dti=z] [[ 0. 0.52359878 0. ] [ 0.2 0.36026544 -1.63333333] [ 0.4 -0.08155862 -2.263988 ] [ 0.6 -0.50774327 -1.2990876 ] [ 0.8 -0.60873334 0.62920692] [ 1. -0.29609456 2.32161986]]
si se mejora la resolución disminuyendo h = 0.05 y muestras = 20 para cubrir el dominio [0,1] se obtiene el siguiente resultado:

Tarea: Para el literal b, se debe considerar que los errores se calculan con
Runge-Kutta 2do Orden tiene error de truncamiento O(h3)
Runge-Kutta 4do Orden tiene error de truncamiento O(h5)
Algoritmo en Python
# 3Eva_IT2019_T2 Péndulo vertical import numpy as np import matplotlib.pyplot as plt def rungekutta2_fg(f,g,x0,y0,z0,h,muestras): tamano = muestras + 1 estimado = np.zeros(shape=(tamano,3),dtype=float) # incluye el punto [x0,y0,z0] estimado[0] = [x0,y0,z0] xi = x0 yi = y0 zi = z0 for i in range(1,tamano,1): K1y = h * f(xi,yi,zi) K1z = h * g(xi,yi,zi) K2y = h * f(xi+h, yi + K1y, zi + K1z) K2z = h * g(xi+h, yi + K1y, zi + K1z) yi = yi + (K1y+K2y)/2 zi = zi + (K1z+K2z)/2 xi = xi + h estimado[i] = [xi,yi,zi] return(estimado) # INGRESO theta = y g = 9.8 L = 0.6 ft = lambda t,y,z: z gt = lambda t,y,z: (-g/L)*np.sin(y) t0 = 0 y0 = np.pi/6 z0 = 0 h=0.2 muestras = 5 # PROCEDIMIENTO tabla = rungekutta2_fg(ft,gt,t0,y0,z0,h,muestras) # SALIDA print(' [ t, \t\t y, \t dyi/dti=z]') print(tabla) # Grafica ti = np.copy(tabla[:,0]) yi = np.copy(tabla[:,1]) zi = np.copy(tabla[:,2]) plt.subplot(121) plt.plot(ti,yi) plt.xlabel('ti') plt.title('yi') plt.subplot(122) plt.plot(ti,zi, color='green') plt.xlabel('ti') plt.title('dyi/dti') plt.show()
Otra solución propuesta puede seguir el problema semejante: