
Las coordenadas de cada punto donde se ubica un dispositivo se obtienen usando un GPS.

Cada nodo se identifica con tres letras y dos dígitos por ejemplo usando cultivo y numeración ascendente al alejarse del gateway. Por ejemplo, para el cultivo de Cacao , radial "A" desde el gateway y punto en ubicación 04 el identificador de ubicación será CA04.
Las coordenadas se registran obteniendo el archivo kml del equipo GPS y contienen los valores de Latitud y Longitud. Por facilidad de uso y ubicación las coordenadas se usan en formato utm (Universal Transverse Mercator).
El archivo KML contiene los datos de los puntos, básicamente en el siguiente formato:
<Placemark>
<name>CA04
<styleUrl>#msn_pink-diamond</styleUrl>
<Point>
<coordinates>-79.96257337394334,
-2.139534989113919,
65.76000000000001</coordinates>
</Point>
</Placemark>
Se adjunta un ejemplo del archivo para pruebas.
El objetivo es generar un archivo con distancias al gateway y alturas del perfil del terreno semejante al ejemplo mostrado:
altitud altitud_gps dist_Gw03 latitud longitud utm_este utm_norte utm_zLetra utm_zNum punto Gw03 65.0 68.30 0.00 -2.140439 -79.962474 615377.0 9763377.0 M 17 LOS01 64.0 66.16 24.74 -2.140222 -79.962528 615371.0 9763401.0 M 17 LOS02 59.0 66.16 75.93 -2.139770 -79.962627 615360.0 9763451.0 M 17 LOS03 58.0 66.16 99.64 -2.139553 -79.962636 615359.0 9763475.0 M 17 LOS04 58.0 66.06 126.44 -2.139309 -79.962645 615358.0 9763502.0 M 17 ...
En cada punto, la altitud_gps se puede mejorar usando el perfil del terreno desde google earth. Las instrucciones se muestran más adelante en "Perfil de alturas de terreno".
Coordenadas en utm
Para la conversión a utm, se usa la librería en Python con el mismo nombre. En caso de no disponer de la librería, puede ser instalada con la instrucción pip desde una ventana de comandos:
pip install utm
con lo que es posible hacer las conversiones a UTM desde latitud y longitud y viceversa.
Las coordenadas en formato UTM para el ejemplo dado, se encuentran ubicadas en la zona «17 M». Revisar para cada caso la zona
Perfil de alturas de terreno
Los datos de alturas del gps usado presentan variaciones irregulares de altura, por lo que para mejores valores se usa el perfil desde google earth usando las marcas de las coordenadas del archivo.kml

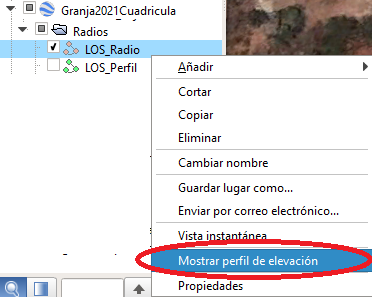
Para visualizar el perfil se agrega una línea como una "ruta" entre el punto del Gateway (Gw3) y el último punto de observación. Los datos del perfil se pueden observar al seleccionar la ruta y usar la opción de "mostrar perfil de elevación". La opción se obtiene con "click derecho" del mouse. Se tiene adicionalmente como referencia, las distancias desde el gateway obtenidas en el proceso de conversión a utm. Los valores leidos de alturas para cada punto se guardan en un archivo .csv
El archivo obtenido en el ejemplo de alturas se muestra en:
Instrucciones en Python
El algoritmo integra los resultados de la conversión de coordenadas a utm, incluye las distancias al gateway e integra las alturas obtenidas de forma externa para tener como resultado el archivo.csv.
Una revisión para generar el archivo es evitar sobreescribir un archivo anterior. Por lo que si se requiere procesar nuevamente los datos se pide borrar el archivo anterior antes de ejecutar el algoritmo.
El algoritmo se divide en procesos identificados por un número ascendente. La variable 'procesoCompletado' permite dar indicaciones de avances en el algoritmo en caso que se produzcan errores como haber escrito el nombre del archivo de datos con errores, que el nombre del gateway debe empezar con "Gw", etc.
# Procesa puntos de coordenadas, a utm # girni-fiec-espol Revision:20220724 # http://blog.espol.edu.ec/girni/ import geopandas as gpd import fiona import utm import numpy as np import pandas as pd import os # INGRESO archivokml = 'Granja2021_LOS.kml' carp_coord = 'Coordenadas' # archivo de alturas tomadas de google arch_altura = 'Granja2021_alturas.csv' # zona UTM zonaNum = 17 zonaLetra = 'M' precision = 2 # PROCEDIMIENTO procesoCompleto = 0 # Lectura de archivo .KML if len(carp_coord)>0: carp_coord = carp_coord+'/' archivo_ruta = carp_coord+archivokml if os.path.exists(archivo_ruta): gpd.io.file.fiona.drvsupport.supported_drivers['KML'] = 'rw' puntos = gpd.read_file(archivo_ruta, driver='KML') puntos = puntos.sort_values(by=['Name']) procesoCompleto = 1 if procesoCompleto == 1: # tabla en UTM tabla = pd.DataFrame() n_Gw = ''; for i in puntos.index: # en latitud, longitud y altura punto_nombre = puntos.loc[i]['Name'] longitud = puntos.loc[i]['geometry'].x latitud = puntos.loc[i]['geometry'].y altitud = puntos.loc[i]['geometry'].z altitud = np.round(altitud,precision) #convierte lat_lon en UTM coord_utm = utm.from_latlon(latitud,longitud, zonaNum,zonaLetra) utm_este = np.round(coord_utm[0],precision) utm_norte = np.round(coord_utm[1],precision) if punto_nombre.startswith('Gw'): n_Gw = punto_nombre x1 = utm_este y1 = utm_norte # añade coordenadas UTM a tabla tabla.at[i,'punto'] = punto_nombre tabla.at[i,'utm_este'] = utm_este tabla.at[i,'utm_norte'] = utm_norte tabla.at[i,'utm_zNum'] = str(zonaNum) tabla.at[i,'utm_zLetra'] = zonaLetra tabla.at[i,'altitud'] = 0 tabla.at[i,'altitud_gps']= altitud tabla.at[i,'latitud'] = latitud tabla.at[i,'longitud'] = longitud procesoCompleto = 2 if procesoCompleto==2: # gateway encontrado if len(n_Gw)>0: procesoCompleto = 3 if procesoCompleto == 3: # distancias a Gateways for i in puntos.index: dist = 0.0 x2 = tabla.at[i,'utm_este'] y2 = tabla.at[i,'utm_norte'] dist = np.sqrt((x2-x1)**2 + (y2-y1)**2) dist = np.round(dist,precision) tabla.at[i,'dist_'+n_Gw] = dist # indice por nombre de punto tabla = tabla.set_index('punto') # ordena por indice tabla = tabla.sort_index(axis=1) procesoCompleto = 4 if procesoCompleto == 4: # añade alturas desde archivo if len(arch_altura)>0: arch_rutaA = carp_coord + arch_altura if os.path.exists(arch_rutaA): tablaAltura = pd.read_csv(arch_rutaA) tablaAltura = tablaAltura.set_index('punto') for cadapunto in tabla.index: if cadapunto in tablaAltura.index: encontrada = tablaAltura.loc[cadapunto]['altitud'] tabla.at[cadapunto,'altitud'] = encontrada procesoCompleto = 5 # Para escritura de archivo archivocsv = archivokml.split('.')[0] + '.csv' archivo_ruta = carp_coord+archivocsv # SALIDA if procesoCompleto == 5: print(tabla) # Escribe archivo: tabla de resultados if os.path.exists(archivo_ruta): print('El archivo existe: ',archivo_ruta) print('Esta acción borraría el archivo último actualizado') print('Puede borrarlo manualmente antes de reintentar') else: tabla.to_csv(archivo_ruta) else: print('proceso completado hasta:', procesoCompleto) print('Revisar errores en proceso:', procesoCompleto+1) print(' Procesos:') print('1: abrir archivo .KML',archivokml) print('2: crear tabla de datos') print('3: encontrar gateway:', n_Gw) print('4: calcula distancia cada punto a gateway') print('5: añadir alturas desde archivo: ', arch_rutaA)
Referencia: Bidirectional UTM-WGS84 converter for python. https://pypi.org/project/utm/0.4.2/