Ejercicio: 2Eva2010TI_T2 EDO Movimiento angular
Para resolver, se usa Runge-Kutta_fg de segundo orden como ejemplo
y'' + 10 \sin (y) =0se hace
y' = z = f(t,y,z)y se estandariza:
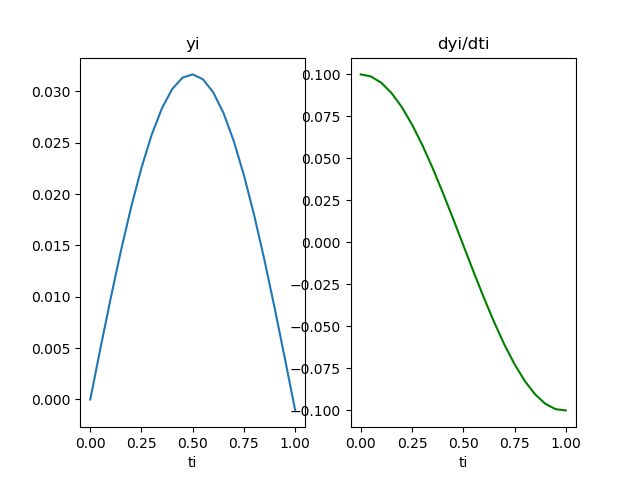
y'' =z'= -10 \sin (y) = g(t,y,z)teniendo como punto de partida t0=0, y0=0 y z0=0.1
y(0)=0, y'(0)=0.1Se desarrolla el algoritmo para obtener los valores:
[ t, y, dyi/dti=z]
[[ 0. 0. 0.1 ]
[ 0.2 0.02 0.08000133]
[ 0.4 0.03200053 0.02401018]
[ 0.6 0.03040355 -0.04477916]
[ 0.8 0.01536795 -0.09662411]
[ 1. -0.00703034 -0.10803459]]que permiten generar la gráfica de respuesta:
Algoritmo en Python
# 2Eva_IT2010_T2 Movimiento angular
import numpy as np
import matplotlib.pyplot as plt
def rungekutta2_fg(f,g,x0,y0,z0,h,muestras):
tamano = muestras + 1
estimado = np.zeros(shape=(tamano,3),dtype=float)
# incluye el punto [x0,y0,z0]
estimado[0] = [x0,y0,z0]
xi = x0
yi = y0
zi = z0
for i in range(1,tamano,1):
K1y = h * f(xi,yi,zi)
K1z = h * g(xi,yi,zi)
K2y = h * f(xi+h, yi + K1y, zi + K1z)
K2z = h * g(xi+h, yi + K1y, zi + K1z)
yi = yi + (K1y+K2y)/2
zi = zi + (K1z+K2z)/2
xi = xi + h
estimado[i] = [xi,yi,zi]
return(estimado)
# INGRESO theta = y
ft = lambda t,y,z: z
gt = lambda t,y,z: -10*np.sin(y)
t0 = 0
y0 = 0
z0 = 0.1
h=0.2
muestras = 5
# PROCEDIMIENTO
tabla = rungekutta2_fg(ft,gt,t0,y0,z0,h,muestras)
# SALIDA
print(' [ t, \t\t y, \t dyi/dti=z]')
print(tabla)
# Grafica
ti = np.copy(tabla[:,0])
yi = np.copy(tabla[:,1])
zi = np.copy(tabla[:,2])
plt.subplot(121)
plt.plot(ti,yi)
plt.xlabel('ti')
plt.title('yi')
plt.subplot(122)
plt.plot(ti,zi, color='green')
plt.xlabel('ti')
plt.title('dyi/dti')
plt.show()