
La trilateración se basa en determinar las posiciones relativas a objetos, para éste caso las balizas d1, d2 y d3 y mediante geometria encontrar el punto central de la intersección de los círculos generados por las posiciones relativas a cada objeto.
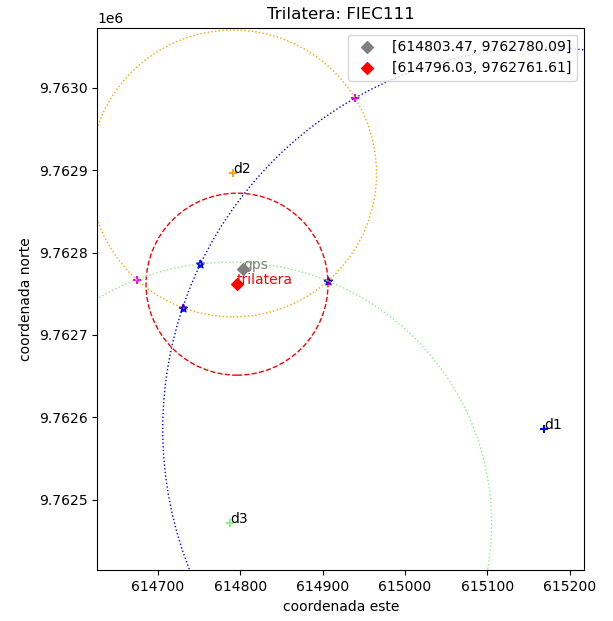
Para una baliza en particular, por ejemplo d2 en color naranja, la distancia relativa permite trazar un círculo a su alrededor. El círculo d2 se intersecta con los otros círculos d1 y d3 generando un área de intersección de tres puntos.
Los tres puntos forman un triángulo cuyo baricentro o centroide permite estimar la ubicación del punto «trilatera» a partir de las distancias relativas a balizas.
En la gráfica se añade la posición del dispositivo medida con un gps diferencial de mayor precisión, mostrando la cercanía entre los puntos.
Cota de Error
En concepto se puede establecer una cota de error a partir del baricentro de la intercepción de los tres círculos.
Una forma conservadora toma la mayor distancia del baricentro a uno de los vértices. Observe que es una cota máxima, como un estimador del error máximo, valores que se comprobarían con los datos del experimento.
Las siguientes secciones desarrollan el algoritmo en Python para el concepto mostrado.
Referencias: Trilateración concepto básico. https://es.wikipedia.org/wiki/Trilateraci%C3%B3n, Baricentro o centroide. https://es.wikipedia.org/wiki/Baricentro