Referencia: Leon-Couch, 3–8 Modulación Delta, p.192 ; Delta-sigma_modulation Wikipedia
La modulación Sigma-Delta (∑Δ ) codifica una señal analógica a digital generando una secuencia de +1 y -1 (impulsos) que representan la diferencia entre la señal analógica muestreada y la señal digital acumulada. Tiene aplicaciones en sintetizadores de frecuencia, fuentes de poder conmutadas y controladores de motor.
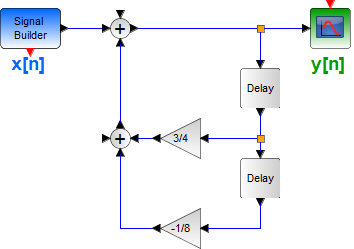
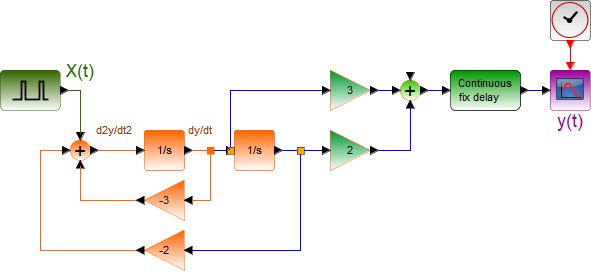
El sistema en diagrama de bloques en simulink se muestra en la figura:
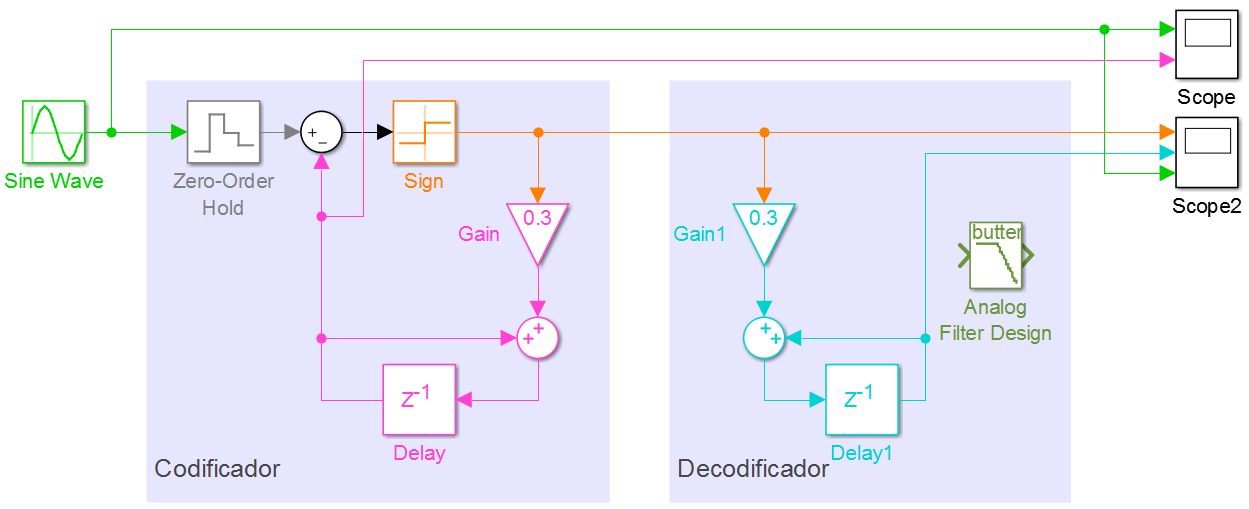
La señal de entrada (Sine Wave) se cuantifica en (Zero-Order Hold).
Luego se obtiene el signo (sign) de la diferencia entre la señal de entrada y la señal digital acumulada (∑) que genera la secuencia de +1 y -1 en la salida del codificador.
El valor de la ganancia Δ=0.3 representa el valor del escalón de subida o bajada de la señal digital acumulada, representada en color magenta.
La secuencia de salida +1 y -1, de nuevo acumulada en el decodificador, permite obtener una versión digital cercana a la señal analógica inicial.
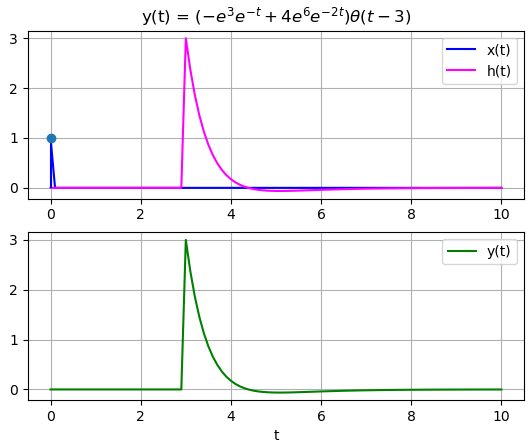
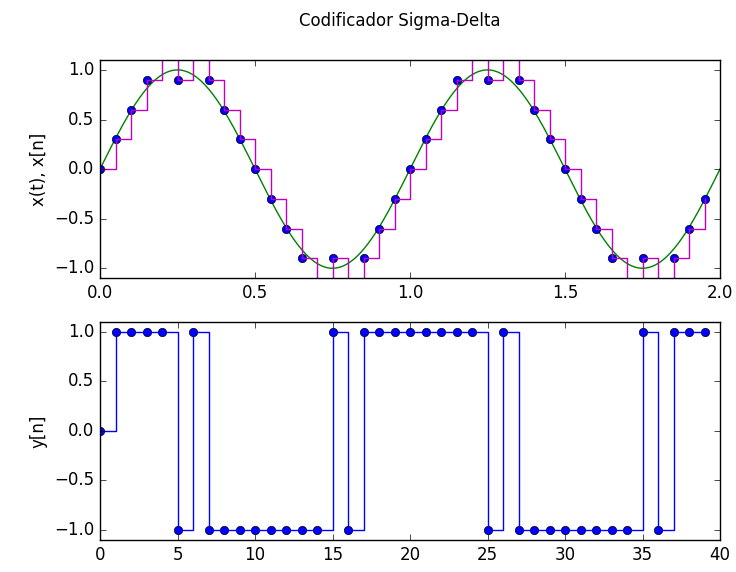
CODIFICADOR Sigma-Delta
La señal de entrada para el ejemplo tiene frecuencia fs=1 Hz, Δ=deltaY=0.3, rango [0,tn] hasta 2 segundos con divisiones k=40 en el rango de tiempo.
>>>
rango [0,tn]:2
Secciones en el rango k:40
[ 0 1 1 1 1 -1 1 -1 -1 -1 -1 -1 -1 -1 -1
1 -1 1 1 1 1 1 1 1 1 -1 1 -1 -1 -1
-1 -1 -1 -1 -1 1 -1 1 1 1]
[ 0.05 0.3 40. ]
El script genera la gráfica y los archivos para datos y parámetros en formato texto.
La señal de entrada y los valores pueden ser modificados en el script adjunto:
# Modulacion Delta - Codificador
# entrada x(t), salida: y[n]
# propuesta:edelros@espol.edu.ec
import numpy as np
import matplotlib.pyplot as plt
# Definir la funcion de Entrada
def entradax(t,fs):
x = np.sin(2*np.pi*fs*t)
return(x)
# PROGRAMA para la modulación
# INGRESO
t0 = 0
tn = float(input('rango [0,tn]:'))
k = int(input('Secciones en el rango k:'))
# PROCEDIMIENTO
# Analógica Referencia
fs = 1
m = 500 # puntos en eje t para gráfico analógica
dm = (tn-t0)/m
t = np.arange(0,tn,dm) # eje tiempo analógica
xanalog = np.zeros(m, dtype=float)
for i in range(0,m):
xanalog[i] = entradax(t[i],fs)
# Codificar Sigma-Delta
deltaY = 0.3 # Tamaño delta en eje Y
deltaT = (tn-t0)/k # Tamaño delta en eje tiempo
td = np.arange(0,tn,deltaT) # tiempo muestreo
muestra = np.zeros(k, dtype=float) # analógica para comparar
xdigital = np.zeros(k, dtype=float) # digital
ysalida = np.zeros(k, dtype=int) # Salida de +1|-1
td[0] = t0
muestra[0] = entradax(td[0],fs)
ysalida[0] = 0
for i in range(1,k):
muestra[i] = entradax(td[i],fs) # referencia analógica
diferencia = muestra[i]-xdigital[i-1]
if (diferencia>0):
bit = 1
else:
bit = -1
xdigital[i] = xdigital[i-1]+bit*deltaY
ysalida[i] = bit
parametros = np.array([deltaT,deltaY,k])
# SALIDA
print(ysalida)
print(parametros)
np.savetxt('sigmadelta_datos.txt',ysalida,fmt='%i')
np.savetxt('sigmadelta_parametros.txt',parametros)
# Graficar
plt.figure(1) # define la grafica
plt.suptitle('Codificador Sigma-Delta')
plt.subplot(211) # grafica de 2x1 y subgrafica 1
plt.ylabel('x(t), x[n]')
xmax=np.max(xanalog)+0.1*np.max(xanalog) # rango en el eje y
xmin=np.min(xanalog)-0.1*np.max(xanalog)
plt.axis((t0,tn,xmin,xmax)) # Ajusta ejes
plt.plot(t,xanalog, 'g')
plt.axis((t0,tn,xmin,xmax))
plt.plot(td,xdigital,'bo') # Puntos x[n]
plt.step(td,xdigital, where='post',color='m')
plt.subplot(212) # grafica de 2x1 y subgrafica 2
plt.ylabel('y[n]')
plt.axis((0,k,-1.1,1.1))
plt.plot(ysalida, 'bo') # Puntos y[n]
puntos = np.arange(0,k,1) #posicion eje x para escalon
plt.step(puntos,ysalida, where='post')
plt.show()
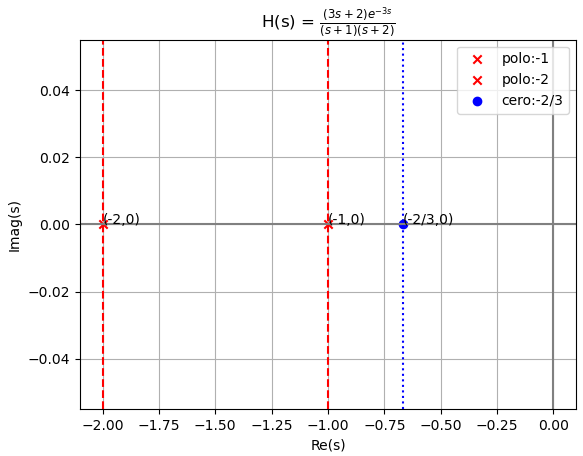
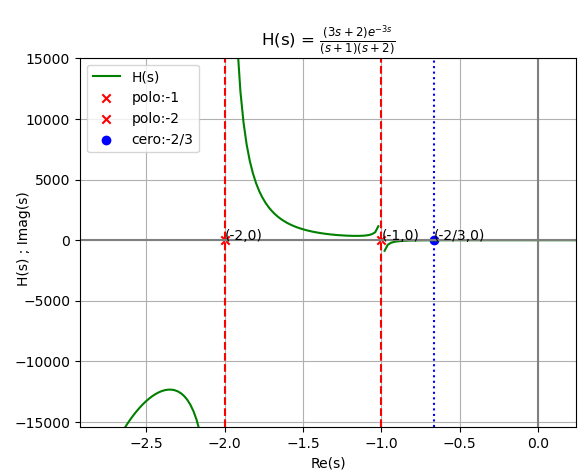
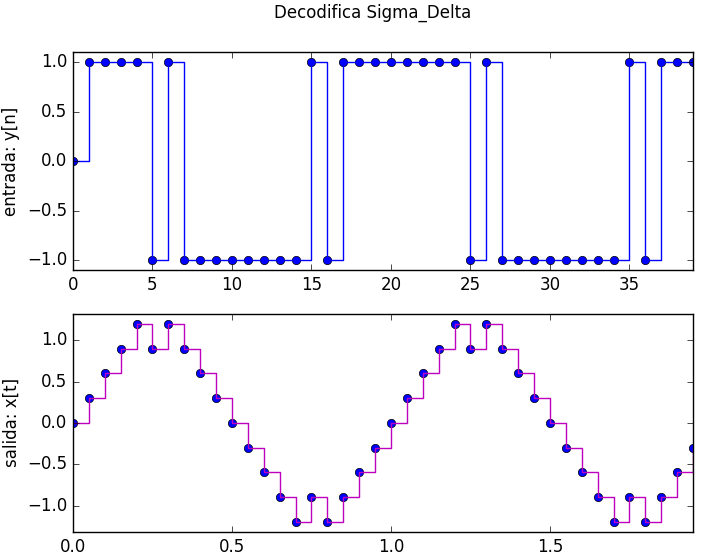
Decodificador Sigma-Delta
Para observar el resultado, se decodifican los datos y se obtiene el siguiente resultado:
>>>
entrada: [ 0 1 1 1 1 -1 1 -1 -1 -1 -1 -1 -1 -1 -1
1 -1 1 1 1 1 1 1 1 1 -1 1 -1 -1 -1
-1 -1 -1 -1 -1 1 -1 1 1 1]
salida:
[ 0.0000000e+00 3.0000000e-01 6.0000000e-01 9.0000000e-01
1.2000000e+00 9.0000000e-01 1.2000000e+00 9.0000000e-01
6.0000000e-01 3.0000000e-01 -1.1102230e-16 -3.0000000e-01
-6.0000000e-01 -9.0000000e-01 -1.2000000e+00 -9.0000000e-01
-1.2000000e+00 -9.0000000e-01 -6.0000000e-01 -3.0000000e-01
-1.1102230e-16 3.0000000e-01 6.0000000e-01 9.0000000e-01
1.2000000e+00 9.0000000e-01 1.2000000e+00 9.0000000e-01
6.0000000e-01 3.0000000e-01 -1.1102230e-16 -3.0000000e-01
-6.0000000e-01 -9.0000000e-01 -1.2000000e+00 -9.0000000e-01
-1.2000000e+00 -9.0000000e-01 -6.0000000e-01 -3.0000000e-01]
realizado usando el siguiente script de python:
# Modulacion Sigma-Delta Decodificador
# entrada y[n], salida: x[n]
# propuesta:edelros@espol.edu.ec
import numpy as np
import matplotlib.pyplot as plt
# INGRESO
archivodatos = 'sigmadelta_datos.txt'
archivoparam = 'sigmadelta_parametros.txt'
# PROCEDIMIENTO
# Lectura de datos desde archivos
yentrada = np.loadtxt(archivodatos,dtype=int)
datos = np.loadtxt(archivoparam,dtype=float)
deltaT = datos[0] # Tamaño delta en eje tiempo
deltaY = datos[1] # Tamaño delta en eje Y
# número de muestras
k = len(yentrada)
xdigital = np.zeros(k, dtype=float)
punto = np.zeros(k, dtype=int) # número de muestra
td = np.zeros(k, dtype=float) # tiempo muestreo
# DECOdifica Sigma-Delta
xdigital[0] = yentrada[0]
punto[0] = 0
td[0] = 0
for i in range(1,k):
punto[i] = i
td[i] = deltaT*i
xdigital[i] = xdigital[i-1]+yentrada[i]*deltaY
# SALIDA
print('entrada:', yentrada)
print('salida:',xdigital,)
# Graficar
plt.figure(1) # define la grafica
plt.suptitle('Decodifica Sigma_Delta')
plt.subplot(211) # grafica de 2x1 y subgrafica 1
plt.ylabel('entrada: y[n]')
plt.axis((0,k-1,-1.1,1.1)) # Ajusta ejes
plt.plot(punto,yentrada,'bo') # Puntos y[n]
plt.step(punto,yentrada, where='post')
plt.subplot(212) # grafica de 2x1 y subgrafica 2
plt.ylabel('salida: x[t]')
# rango en el eje y
xmax = np.max(xdigital)+0.1*np.max(xdigital)
xmin = np.min(xdigital)-0.1*np.max(xdigital)
plt.axis((0,td[k-1],xmin,xmax)) # Ajusta ejes
plt.plot(td,xdigital,'bo')
plt.step(td,xdigital, where='post', color='m')
plt.show()
Tarea
Realice observaciones cambiando:
a) la frecuencia de la señal de entrada,
b) el valor para deltaY
c) el rango tnd) el número de secciones en el tiempo
e) la forma de la señal de entrada a triangular, diente de sierra, exponencial periódica, etc.