Los siguientes ejercicios de LTI Discretos muestran los desarrollos cuando el denominador de la función de transferencia tiene:
1. raíces reales diferentes (No repetidas)
2. raíces reales repetidas
3. raíces con números complejos
Ejercicio 1. Raíces reales diferentes
Referencia: Lathi Ejemplo 3.13 p271
Para un sistema LTID descrito por la ecuación de diferencias mostrada,
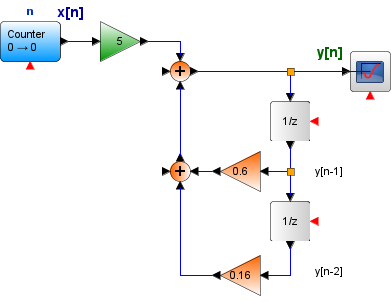
y[n+2] - 0.6 y[n+1] - 0.16 y[n] = 5x[n+2]encuentre la respuesta a entrada cero y0[n] del sistema dadas las condiciones iniciales y[-1]=0, y[-2] =25/4, ante una entrada
x[n]= 4^{-n} \mu [n](El componente de estado cero se calcula en la sección correspondiente)
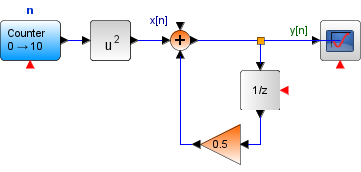
Para realizar el diagrama, se desplaza la ecuación en dos unidades
y[n] - 0.6 y[n-1] - 0.16 y[n-2] = 5x[n] y[n] = 0.6 y[n-1] + 0.16 y[n-2] + 5x[n]Para respuesta a entrada cero se usa x[n] = 0
1.1 Desarrollo analítico
y[n+2] - 0.6 y[n+1] - 0.16 y[n] = 5x[n+2]La ecuación del sistema en notación de operador E es:
E^2 y[n] - 0.6 E y[n] - 0.16 y[n] = 5 E^2 x[n] (E^2 - 0.6 E - 0.16) y[n] = 5 E^2 x[n]que para entrada cero tiene x[n]=0,
(E^2 - 0.6 E - 0.16) y[n] = 0tiene el polinomio característico,
\gamma^2 - 0.6 \gamma - 0.16 = 0 (\gamma+0.2) (\gamma - 0.8) = 0con raíces características γ1=-0.2 y γ2=0.8, obtenidas con instrucciones con Python:
raices: [ 0.8 -0.2] coeficientes: [0.8 0.2]
la repuesta a entrada cero tiene la forma
y_0[n] = c_1 (-0.2)^n + c_2 (0.8)^nse usan las condiciones iniciales para determinar las constantes c1 y c2 aplicadas como:
y_0[-1] = c_1 (-0.2)^{-1} + c_2 (0.8)^{-1} 0 = -5 c_1 + 1.25 c_2 y_0[-2] = c_1 (-0.2)^{-2} + c_2 (0.8)^{-2} \frac{25}{4} = 25 c_1 + 1.5625 c_2se tiene el sistema de ecuaciones
0 = -5 c_1 + 1.25 c_2 \frac{25}{4} = 25 c_1 + 1.5625 c_2resolviendo se encuentra que: c1 = 0.2 c2 = 0.8
con lo que la solución tiene la expresión basado en la sumatoria de ci ϒn, para n≥0
y_0 [n] = \frac{1}{5} (-0.2)^n + \frac{4}{5} (0.8)^nInstrucciones en Python
import numpy as np coeficientes = [1.,-0.6,-0.16] raiz = np.roots(coeficientes) print('raices:') print(raiz) A = np.array([[raiz[0]**(-1) , raiz[1]**(-1)], [raiz[0]**(-2) , raiz[1]**(-2)]]) B = np.array([0., 25/4]) ci = np.linalg.solve(A,B) print('coeficientes:') print(ci)
1.2 Desarrollo con Python
El algoritmo requiere los coeficientes de la ecuación de diferencias Q(E) y P(E) junto a las condiciones iniciales.
QE = [1., -0.6, -0.16] PE = [5., 0., 0.] inicial = [25/4, 0.]
que da como resultado:
respuesta entrada cero:
raices: [ 0.8 -0.2]
Matriz:
[[ 1.5625 25. ]
[ 1.25 -5. ]]
Ci: [0.8 0.2]
y0:
n n
0.2*-0.2 + 0.8*0.8
Instrucciones en Python
# Sistema LTID. Respuesta entrada cero # resultado con raices Reales # ejercicio Lathi ejemplo 3.13 p271 import numpy as np import sympy as sym import matplotlib.pyplot as plt # INGRESO # coeficientes E con grado descendente QE = [1., -0.6, -0.16] PE = [5., 0., 0.] # condiciones iniciales ascendente ...,y[-2],y[-1] inicial = [25/4, 0.] # PROCEDIMIENTO # Respuesta a ENTRADA CERO # raices, revisa numeros complejos gamma = np.roots(QE) revisaImag = np.iscomplex(gamma) escomplejo = np.sum(revisaImag) # coeficientes de ecuacion m_q = len(QE)-1 Ac = np.zeros(shape=(m_q,m_q),dtype=float) if escomplejo == 0: for i in range(0,m_q,1): for j in range(0,m_q,1): Ac[i,j] = gamma[j]**(-m_q+i) ci = np.linalg.solve(Ac,inicial) # ecuacion y0 n = sym.Symbol('n') y0 = 0 if escomplejo == 0: for i in range(0,m_q,1): y0 = y0 + ci[i]*(gamma[i]**n) # SALIDA print('respuesta entrada cero: ') print('raices: ', gamma) if escomplejo == 0: print('Matriz: ') print(Ac) print('Ci: ', ci) print('y0:') sym.pprint(y0) else: print(' existen raices con números complejos.') print(' usar algoritmo de la sección correspondiente.')
Raíces: [reales No repetidas] [reales repetidas] [números complejos]
2. Raíces repetidas
Referencia: Lathi Ejemplo 3.15 p274
y[n+2] +6 y[n+1] + 9 y[n] = 2 x[n+2] + 6 x[n+1]con las condiciones iniciales y0[-1] = -1/3 y y0[-2] = -2/9
Para realizar el diagrama de bloques, se desplaza ambos lados de la ecuación en 2 unidades. Luego se despeja y[n]
y[n] +6 y[n-1] + 9 y[n-2] = 2 x[n] + 6 x[n-1] y[n] = -6 y[n-1] - 9 y[n-2] + 2 x[n] + 6 x[n-1]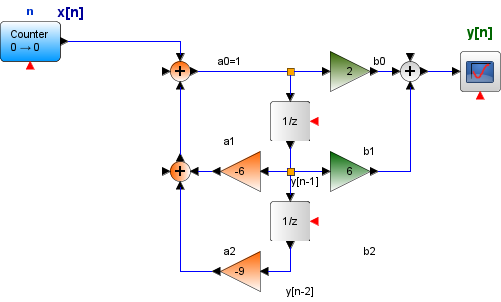
2.1 Desarrollo analítico
siguiendo los mismos pasos que en los ejercicios anteriores
E^2 y[n] +6 E y[n] + 9 y[n] = 2 E^2 x[n] + 6 E x[n] (E^2 +6 E + 9) y[n] = (2 E^2 + 6 E) x[n]Para entrada cero se tiene x[n] = 0
(E^2 +6 E + 9) y[n] = (2 E^2 + 6 E) (0) \gamma^2 +6 \gamma + 9 = 0 (\gamma + 3)( \gamma + 3) = 0de donde se muestra una raiz repetida γ=3, donde los modos característicos hacen que la expresión sea:
y_0[n] = (c_1 + c_2 n) (\gamma)^nsiguiendo el procedimiento realizado para raíces reales se puede determinar los valores de c1=4 y c2=3, con lo que se obtiene la solución:
y_0[n] = (4 + 3n) (-3)^nlos resultados obtenidos con el algoritmo en Python son
respuesta entrada cero:
raices: [-3. -3.]
Raices repetidas: 1
Matriz:
[[ 0.11111111 -0.22222222]
[-0.33333333 0.33333333]]
Ci: [4. 3.]
y0:
n
-3.0 *(3.0*n + 4.0)
>>>
2.2 Instrucciones en Python, integrando raices reales únicas y repetidas
# Sistema LTID. Respuesta entrada cero # QE con raices Reales NO repetidas Lathi ejemplo 3.13 pdf271 # QE con raices Reales Repetidas Lathi ejemplo 3.15 p274 # blog.espol.edu.ec/telg1001 import numpy as np import sympy as sym import matplotlib.pyplot as plt # INGRESO # coeficientes E con grado descendente QE = [1., 6., 9.] PE = [2., 6., 0.] # condiciones iniciales ascendente ...,y[-2],y[-1] inicial = [-2/9, -1/3] tolera = 1e-6 # casi_cero # PROCEDIMIENTO # Respuesta a ENTRADA CERO # raices, revisa numeros complejos gamma = np.roots(QE) revisaImag = np.iscomplex(gamma) escomplejo = np.sum(revisaImag) # coeficientes de ecuacion m_q = len(QE)-1 Ac = np.zeros(shape=(m_q,m_q),dtype=float) # revisa si parte compleja <tolera o casi_cero if escomplejo>0: for i in range(0,m_q,1): if np.imag(gamma[i]) < tolera: gamma[i] = float(np.real(gamma[i])) sumaj = np.sum(np.imag(gamma)) if sumaj <tolera: gamma = np.real(gamma) escomplejo = 0 # revisa repetidos unicoscuenta = np.unique(gamma,return_counts=True) repetidas = np.sum(unicoscuenta[1]-1) # raices Reales no repetidas if escomplejo == 0 and repetidas==0: for i in range(0,m_q,1): for j in range(0,m_q,1): Ac[i,j] = gamma[j]**(-m_q+i) ci = np.linalg.solve(Ac,inicial) # raices Reales repetidas if escomplejo == 0 and repetidas > 0: for i in range(0,m_q,1): for j in range(0,m_q,1): Ac[i,j] = ((-m_q+i)**j)*gamma[j]**(-m_q+i) ci = np.linalg.solve(Ac,inicial) # ecuacion y0 entrada cero n = sym.Symbol('n') y0 = 0*n if escomplejo == 0 and repetidas==0: for i in range(0,m_q,1): y0 = y0 + ci[i]*(gamma[i]**n) if escomplejo == 0 and repetidas > 0: for i in range(0,m_q,1): y0 = y0 + ci[i]*(n**i)*(gamma[i]**n) y0 = y0.simplify() # SALIDA print('respuesta entrada cero: ') print('raices: ', gamma) if escomplejo == 0: if repetidas>0: print('Raices repetidas: ', repetidas) print('Matriz: ') print(Ac) print('Ci: ', ci) print('y0:') sym.pprint(y0) else: print(' existen raices con números complejos.') print(' usar algoritmo de la sección correspondiente.')
Raíces: [reales No repetidas] [reales repetidas] [números complejos]
Ejercicio 3. Raices con números complejos
Referencia: Lathi Ejemplo 3.16 p275
Para el caso de tener raíces con números complejos se muestra el siguiente ejemplo:
y[n+2] - 1.56 y[n+1] + 0.81 y[n] = x[n+1] + 3x[n]con condiciones iniciales y0[-1]=2 y y0[-2]=1
Para realizar el diagrama de bloques, se desplaza ambos lados de la ecuación en 2 unidades. Luego se despeja y[n]
y[n] - 1.56 y[n-1] + 0.81 y[n-2] = x[n-1] + 3x[n-2] y[n] = 1.56 y[n-1] - 0.81 y[n-2] + x[n-1] + 3x[n-2]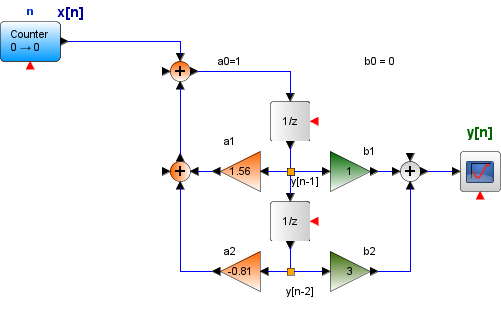
3.1 Desarrollo analítico
y[n+2] - 1.56 y[n+1] + 0.81 y[n] = x[n+1] + 3x[n]La expresión usando operador E:
E^2 y[n] - 1.56 E y[n] + 0.81 y[n] = E x[n] + 3x[n] (E^2 - 1.56 E + 0.81) y[n] = (E+ 3)x[n]para entrada cero se hace x[n] = 0
(E^2 - 1.56 E + 0.81) y[n] = (E+ 3)(0)por lo que, el polinomio característico es,}
(\gamma^2 - 1.56 \gamma + 0.81) = 0con raíces de números complejos
(\gamma - (0.78 + j 0.45))(\gamma - (0.78-j 0.45)) = 0la raíz también se puede escribir como:
\gamma = 0.9 e^{\pm j\frac{\pi}{6}}obtenida mediante:
raices: [0.78+0.44899889j 0.78-0.44899889j] magnitud: [0.9 0.9] angulo: [ 0.52231482 -0.52231482] >>>
Se puede escribir la solución como:
y_0[n] = c(0.9)n e^{j\frac{\pi}{6} } + c^{*} (0.9)n e^{-j\frac{\pi}{6}}Luego aplicando oas condiciones iniciales se encuentra que
c = 2.34 e^{-j0.17} c^{*} = 2.34 e^{j0.17}Otra manera de desarrollo permite encontrar la solución usando la forma real de la solución, conociendo que la solución esta dada por la expresión:
y_0[n] = c(0.9)^n \cos \Big( \frac{\pi}{6}n + \theta \Big)con lo que se puede crear el sistema de ecuaciones aplicando las condiciones iniciales, ademas de considerar que:
\cos(a \pm b) = \cos(a) \cos(b) \mp \sin(a) \sin(b)Para y0[-2] = 1
1 = c(0.9)^{-2} \cos \Big( \frac{\pi}{6}(-2) + \theta \Big) 1 = c\frac{1}{(0.9)^2} \Big[ \cos \big(-2\frac{\pi}{6} \big) \cos ( \theta ) - \sin \big(-2\frac{\pi}{6}\big) \sin (\theta) \Big] 1 = c\frac{1}{0.81} \Big[ \frac{1}{2} \cos ( \theta ) - \frac{-\sqrt{3}}{2} \sin (\theta) \Big] 1 = c \Big[ \frac{1}{1.62} \cos ( \theta ) + \frac{\sqrt{3}}{1.62} \sin (\theta) \Big]Para y0[-1] = 2
2 = c(0.9)^{-1} \cos \Big( \frac{\pi}{6}(-1) + \theta \Big) 2 = c\frac{1}{0.9} \Big[ \cos \big(-\frac{\pi}{6} \big) \cos ( \theta ) - \sin \big(-\frac{\pi}{6}\big) \sin (\theta) \Big] 2 = c\frac{1}{0.9} \Big[ \frac{\sqrt{3}}{2} \cos ( \theta ) - \frac{-1}{2} \sin (\theta) \Big] 2 = c\Big[ \frac{\sqrt{3}}{1.8} \cos ( \theta ) + \frac{1}{1.8} \sin (\theta) \Big]con lo que se puede determinar los valores para [c cos(θ)] y [c sin(θ)]
usando una matriz A y vector B a partir de las ecuaciones
c \cos ( \theta ) = 2.31 c \sin ( \theta ) = -0.4049al dividir [c sin(θ)]/[c cos(θ)] = tan (θ), con lo que se obtiene el ángulo en radianes.
\frac{ c \sin ( \theta )} {c \cos ( \theta )} = \frac{-0.4049}{2.31} = -0.17528 \theta = \tan ^{-1} (-0.17528) = -0.1735al sustituir el valor en c cos(θ) = 2.31 se tiene,
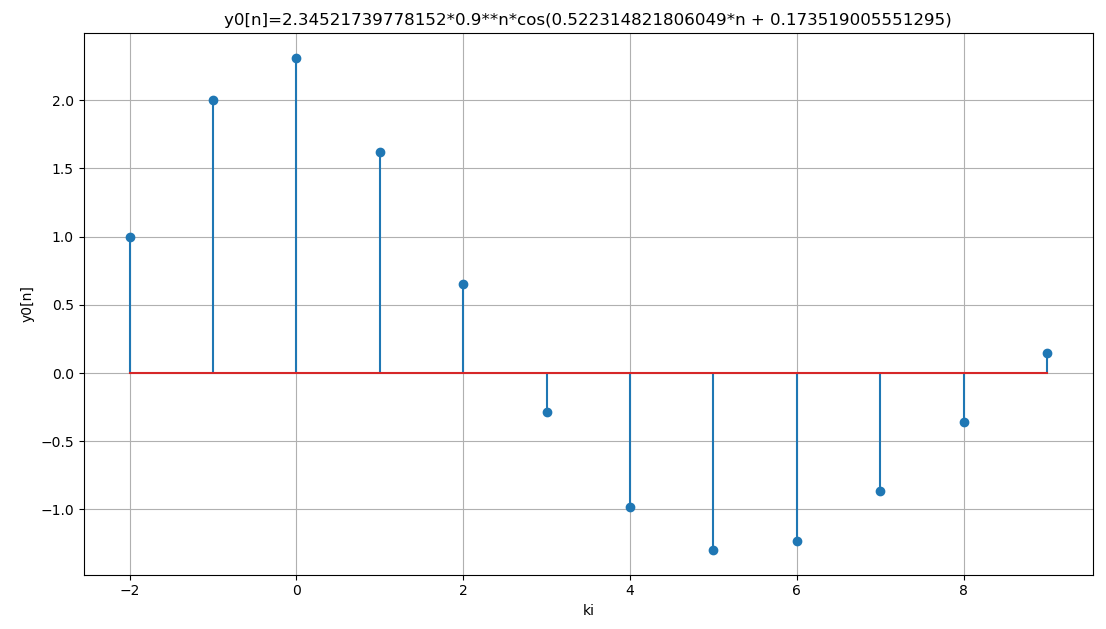
c = \frac{2.31}{ \cos (-0.1735)} = 2.3452con lo que la solución se puede escribir mediante:
y_0[n] = 2.3452 (0.9)^n \cos \Big( \frac{\pi}{6}n - 0.1735 \Big)para n≥0
Instrucciones de cálculo
import numpy as np coeficientes = [1.,-1.56,0.81] raiz = np.roots(coeficientes) print('raices:') print(raiz) g_magnitud = np.absolute(raiz) g_angulo = np.angle(raiz) print('magnitud: ',g_magnitud) print('angulo: ',g_angulo)
3.2 Algoritmo en Python, integrando raices reales y complejas
usando el algoritmo se obtienen los siguientes resultados:
Respuesta entrada cero:
raices : [0.78+0.44899889j 0.78-0.44899889j]
raices complejas: 2
magnitud: [0.9 0.9]
theta: [ 0.52231482 -0.52231482]
Matriz:
[[0.62002743 1.06757851]
[0.96296296 0.55431961]]
Cj: [ 2.31 -0.40490078]
Ci: 2.345217397781524
y0:
n
2.34521739778152*0.9 *cos(0.522314821806049*n + 0.173519005551295)
>>>
Para el caso de raíces complejas, se añade al algoritmo anterior las instrucciones en Python:
# Sistema LTID. Respuesta entrada cero # QE con raices Reales NO repetidas Lathi ejemplo 3.13 pdf271 # QE con raices Reales Repetidas Lathi ejemplo 3.15 p274 # QE con raices Complejas Lathi ejemplo 3.16 p275 # blog.espol.edu.ec/telg1001 import numpy as np import sympy as sym import matplotlib.pyplot as plt # INGRESO # coeficientes E con grado descendente QE = [1.0, -1.56, 0.81] PE = [0., 1., 3.] # condiciones iniciales ascendente ...,y[-2],y[-1] inicial = [1.,2.] tolera = 1e-6 # casi_cero muestras = 10 # para grafica # PROCEDIMIENTO # Respuesta a ENTRADA CERO # raices, revisa numeros complejos gamma = np.roots(QE) revisaImag = np.iscomplex(gamma) escomplejo = np.sum(revisaImag) # coeficientes de ecuacion m_q = len(QE)-1 Ac = np.zeros(shape=(m_q,m_q),dtype=float) # revisa si parte compleja <tolera o casi_cero if escomplejo>0: for i in range(0,m_q,1): valorimag = np.imag(gamma[i]) if np.abs(valorimag)<tolera: gamma[i] = float(np.real(gamma[i])) sumaj = np.sum(np.abs(np.imag(gamma))) if sumaj <tolera: print(sumaj) gamma = np.real(gamma) escomplejo = 0 # revisa repetidos unicoscuenta = np.unique(gamma,return_counts=True) repetidas = np.sum(unicoscuenta[1]-1) # Determina coeficientes ci de Y[n] # raices Reales no repetidas if escomplejo == 0 and repetidas==0: for i in range(0,m_q,1): for j in range(0,m_q,1): Ac[i,j] = gamma[j]**(-m_q+i) ci = np.linalg.solve(Ac,inicial) # raices Reales repetidas if escomplejo == 0 and repetidas > 0: for i in range(0,m_q,1): for j in range(0,m_q,1): Ac[i,j] = ((-m_q+i)**j)*gamma[j]**(-m_q+i) ci = np.linalg.solve(Ac,inicial) # raices Complejas if escomplejo > 0: g_magnitud = np.absolute(gamma) g_angulo = np.angle(gamma) for i in range(0,m_q,1): k = -(m_q-i) a = np.cos(np.abs(g_angulo[i])*(k))*(g_magnitud[i]**(k)) b = -np.sin(np.abs(g_angulo[i])*(k))*(g_magnitud[i]**(k)) Ac[i] = [a,b] Ac = np.array(Ac) cj = np.linalg.solve(Ac,inicial) theta = np.arctan(cj[1]/cj[0]) ci = cj[0]/np.cos(theta) # ecuacion y0 entrada cero n = sym.Symbol('n') y0 = 0*n if escomplejo == 0 and repetidas==0: for i in range(0,m_q,1): y0 = y0 + ci[i]*(gamma[i]**n) if escomplejo == 0 and repetidas > 0: for i in range(0,m_q,1): y0 = y0 + ci[i]*(n**i)*(gamma[i]**n) y0 = y0.simplify() if escomplejo > 0: y0 = ci*(g_magnitud[0]**n)*sym.cos(np.abs(g_angulo[i])*n - theta) # SALIDA print('respuesta entrada cero: ') print('raices: ', gamma) if escomplejo == 0: if repetidas>0: print('Raices repetidas: ', repetidas) print('Matriz: ') print(Ac) print('Ci: ', ci) print('y0:') sym.pprint(y0) if escomplejo > 0: print('raices complejas: ', escomplejo) print('magnitud:',g_magnitud) print('theta:',g_angulo) print('Matriz: ') print(Ac) print('Cj: ', cj) print('Ci: ',ci) print('y0: ') sym.pprint(y0) # grafica datos ki = np.arange(-m_q,muestras,1) y0i = np.zeros(muestras+m_q) # valores iniciales y0i[0:m_q] = inicial[0:m_q] # evaluación de y0[n] y0n = sym.lambdify(n,y0) y0i[m_q:] = y0n(ki[m_q:]) # grafica y[n] ante x[n]=0 plt.stem(ki,y0i) plt.xlabel('ki') plt.ylabel('y0[n]') plt.title('y0[n]='+str(y0)) plt.grid() plt.show()
Raíces: [reales No repetidas] [reales repetidas] [números complejos]