1ra Evaluación 2024-2025 PAO I. 2/Julio/2024
Tema 3 (30 puntos) El acelerado crecimiento de la población de mayor edad tendrá un fuerte impacto en los gastos futuros del Instituto de Seguridad Social (IESS), una entidad a la que actualmente (2024) no le alcanzan sus ingresos para pagar las pensiones a sus jubilados y otros rubros. [1] 
Un motivo a considerar, podría ser la caída de la natalidad es un fenómeno generalizado en los países desarrollados que tienen tasa de hijos por mujer en edad fértil por debajo de la tasa de reemplazo poblacional de 2.1
Ejemplos de estos casos son Corea del Sur, Japón y China [2,3], países donde la cantidad de personas que trabajan y aportan al seguro social tiende a ser cada vez menor respecto a los pensionistas (jubilados).
Para el caso de Ecuador a fin de realizar un análisis preliminar, se requiere disponer de un modelo matemático que permita estimar cuando ser alcanzaría esta tasa de natalidad.
| tasa | 7.32 | 6.39 | 5.58 | 4.89 | 4.31 | 3.85 | 3.50 | 3.26 | 3.03 | 2.79 | 2.54 | 2.35 |
| año | 1965 | 1970 | 1975 | 1980 | 1985 | 1990 | 1995 | 2000 | 2005 | 2010 | 2015 | 2020 |
| k | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
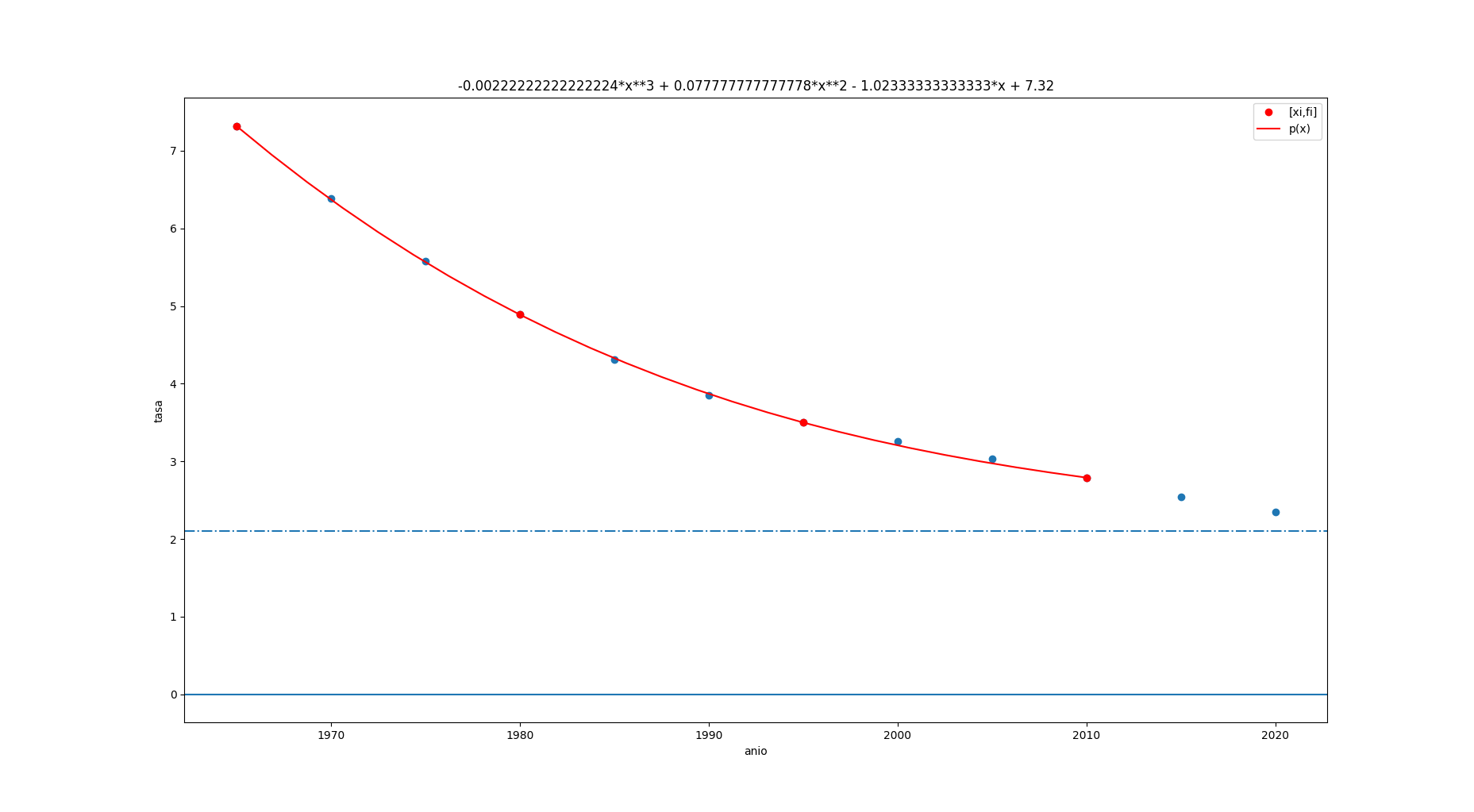
Realice un modelo de interpolación polinómica usando los datos de los años 1965, 1980, 1995 y 2010.
a. Describa el planteamiento del ejercicio, justificando el grado del polinomio seleccionado
b. Realice el del sistema de ecuaciones en su forma matricial y muestre la matriz aumentada
c. Resuelva el sistema usando los algoritmos correspondientes.
d. Presente el polinomio obtenido y grafique verificando que P(x) pase por los puntos de muestra.
e. Use el resultado P(x) para estimar la tasa de hijos por mujer para el año 2020 y calcule el error.
f. Estime el año en que se alcanza la tasa mínima de reemplazo de 2.1
Adjunte los archivos de resultados, algoritmos y gráficas realizados para el ejercicio
Rúbrica: literal a (5 puntos), literal b (5 puntos), literal c (5 puntos), literal d (5 puntos), literal e (5 puntos) ), literal f (5 puntos).
Referencia: [1] IESS: Envejecimiento de la población disparará gastos; Peña plantea subir aportes. Primicias.ec: 3 Marzo 2024. https://www.primicias.ec/noticias/economia/envejecimiento-poblacion-iess-aportes/
[2] «Emergencia nacional» en Corea del Sur: por qué las mujeres surcoreanas no están teniendo hijos. BBC News Mundo. 30 marzo 2024.
[3] Por qué China amplió a 3 el número de hijos que pueden tener las parejas. BBC News Mundo. 4 junio 2021.
https://www.youtube.com/watch?v=8kErwjPKwjY .
[4] 5 datos sobre población del Ecuador. INEC Ecuador. 29 Agosto 2019. Min 0:45 https://www.youtube.com/watch?v=wjTZNfykmZU [5] ¿Por qué los PAÍSES RICOS se enfrentan al COLAPSO DEMOGRÁFICO? VisualEconomik. 11 Octubre 2022.
import numpy as np tasa = [7.32, 6.39, 5.58, 4.89, 4.31, 3.85, 3.50, 3.26, 3.03, 2.79, 2.54, 2.35] anio = [1965, 1970, 1975, 1980, 1985, 1990, 1995, 2000, 2005, 2010, 2015, 2020] k = [ 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11] cual = [0,3,6,9] tasamin = 2.1 fi = np.take(tasa,cual) # datos seleccionados