
U6videos EDO – Ecuaciones Diferenciales Ordinarias
U5videos Integración y Diferenciación Numérica
U4videos Interpolación polinómica
U3videos Sistemas de ecuaciones
U2videos Raíces de ecuaciones en una variable
U1videos Polinomio de Taylor con Python
7.3 EDP hiperbólicas
Referencia: Chapra PT8.1 p.860 pdf.884, Rodriguez 10.4 p.435
Las Ecuaciones Diferenciales Parciales tipo hiperbólicas semejantes a la mostrada, para un ejemplo en particular, representa la ecuación de onda de una dimensión u[x,t], que representa el desplazamiento vertical de una cuerda.
\frac{\partial ^2 u}{\partial t^2}=c^2\frac{\partial ^2 u}{\partial x^2}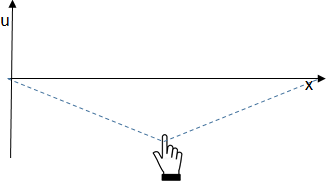
Los extremos de la cuerda de longitud unitaria están sujetos y referenciados a una posición 0 a la izquierda y 1 a la derecha.
u[x,t] , 0<x<1, t≥0 u(0,t) = 0 , t≥0 u(1,t) = 0 , t≥0
Al inicio, la cuerda está estirada por su punto central:
u(x,0) = \begin{cases} -0.5x &, 0\lt x\leq 0.5 \\ 0.5(x-1) &, 0.5\lt x \lt 1 \end{cases}Se suelta la cuerda, con velocidad cero desde la posición inicial:
\frac{\partial u(x,0)}{\partial t} = 0La solución se realiza de forma semejante al procedimiento para EDP parabólicas y elípticas. Se cambia a la forma discreta usando diferencias finitas divididas:
\frac{u_{i,j+1}-2u_{i,j}+u_{i,j-1}}{(\Delta t)^2} =c^2 \frac{u_{i+1,j}-2u_{i,j}+u_{i-1,j}}{(\Delta x)^2}El error es del orden O(\Delta x)^2 + O(\Delta t)^2.
se reagrupa de la forma:
El término constante, por facilidad se simplifica con el valor de 1
\lambda = \frac{c^2 (\Delta t)^2}{(\Delta x)^2} =1si c = 2 y Δx = 0.2, se deduce que Δt = 0.1
que al sustituir en la ecuación, se simplifica anulando el término u[i,j]:
u_{i,j+1}+u_{i,j-1} = u_{i+1,j}+u_{i-1,j}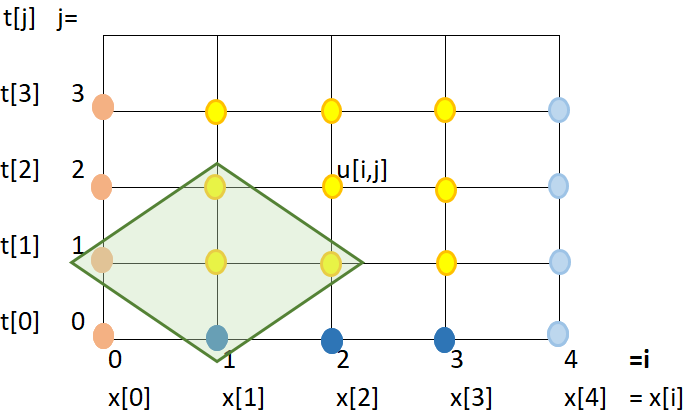
en los que intervienen solo los puntos extremos. Despejando el punto superior del rombo:
u_{i,j+1} = u_{i+1,j}-u_{i,j-1}+u_{i-1,j}Convergencia:
\lambda = \frac{c^2 (\Delta t)^2}{(\Delta x)^2} \leq 1para simplificar aún más el problema, se usa la condición velocidad inicial de la cuerda igual a cero
\frac{\delta u_{i,0}}{\delta t}=\frac{u_{i,1}-u_{i,-1}}{2\Delta t} = 0 u_{i,-1}=u_{i,1}que se usa para cuando el tiempo es cero, permite calcular los puntos para t[1]:
j=0
u_{i,1} = u_{i+1,0}-u_{i,-1}+u_{i-1,0} u_{i,1} = u_{i+1,0}-u_{i,1}+u_{i-1,0} 2 u_{i,1} = u_{i+1,0}+u_{i-1,0} u_{i,1} = \frac{u_{i+1,0}+u_{i-1,0}}{2}Aplicando solo cuando j = 0

que al ponerlos en la malla se logra un sistema explícito para cada u[i,j], con lo que se puede resolver con un algoritmo:
Algoritmo en Python:
# Ecuaciones Diferenciales Parciales # Hiperbólica. Método explicito import numpy as np def cuerdainicio(xi): n = len(xi) y = np.zeros(n,dtype=float) for i in range(0,n,1): if (xi[i]<=0.5): y[i]=-0.5*xi[i] else: y[i]=0.5*(xi[i]-1) return(y) # INGRESO x0 = 0 xn = 1 # Longitud de cuerda y0 = 0 yn = 0 # Puntos de amarre t0 = 0 c = 2 # discretiza tramosx = 16 tramost = 32 dx = (xn-x0)/tramosx dt = dx/c # PROCEDIMIENTO xi = np.arange(x0,xn+dx,dx) tj = np.arange(0,tramost*dt+dt,dt) n = len(xi) m = len(tj) u = np.zeros(shape=(n,m),dtype=float) u[:,0] = cuerdainicio(xi) u[0,:] = y0 u[n-1,:] = yn # Aplicando condición inicial j = 0 for i in range(1,n-1,1): u[i,j+1] = (u[i+1,j]+u[i-1,j])/2 # Para los otros puntos for j in range(1,m-1,1): for i in range(1,n-1,1): u[i,j+1] = u[i+1,j]-u[i,j-1]+u[i-1,j] # SALIDA np.set_printoptions(precision=2) print('xi =') print(xi) print('tj =') print(tj) print('matriz u =') print(u)
con lo que se obtienen los resultados numéricos, que para mejor interpretación se presentan en una gráfica estática y otra animada.
# GRAFICA import matplotlib.pyplot as plt for j in range(0,m,1): y = u[:,j] plt.plot(xi,y) plt.title('EDP hiperbólica') plt.xlabel('x') plt.ylabel('y') plt.show() # **** GRÁFICO CON ANIMACION *********** import matplotlib.animation as animation # Inicializa parametros de trama/foto retardo = 70 # milisegundos entre tramas tramas = m maximoy = np.max(np.abs(u)) figura, ejes = plt.subplots() plt.xlim([x0,xn]) plt.ylim([-maximoy,maximoy]) # lineas de función y polinomio en gráfico linea_poli, = ejes.plot(xi,u[:,0], '-') plt.axhline(0, color='k') # Eje en x=0 plt.title('EDP hiperbólica') # plt.legend() # txt_x = (x0+xn)/2 txt_y = maximoy*(1-0.1) texto = ejes.text(x0,txt_y,'tiempo:', horizontalalignment='left') plt.xlabel('x') plt.ylabel('y') plt.grid() # Nueva Trama def unatrama(i,xi,u): # actualiza cada linea linea_poli.set_ydata(u[:,i]) linea_poli.set_xdata(xi) linea_poli.set_label('tiempo linea: '+str(i)) texto.set_text('tiempo['+str(i)+']') # color de la línea if (i<=9): lineacolor = 'C'+str(i) else: numcolor = i%10 lineacolor = 'C'+str(numcolor) linea_poli.set_color(lineacolor) return linea_poli, texto # Limpia Trama anterior def limpiatrama(): linea_poli.set_ydata(np.ma.array(xi, mask=True)) linea_poli.set_label('') texto.set_text('') return linea_poli, texto # Trama contador i = np.arange(0,tramas,1) ani = animation.FuncAnimation(figura, unatrama, i , fargs=(xi,u), init_func=limpiatrama, interval=retardo, blit=True) # Graba Archivo video y GIFAnimado : # ani.save('EDP_hiperbólica.mp4') ani.save('EDP_hiperbolica.gif', writer='imagemagick') plt.draw() plt.show()
Una vez realizado el algoritmo, se pueden cambiar las condiciones iniciales de la cuerda y se observan los resultados.
Se recomienda realizar otros ejercicios de la sección de evaluaciones para EDP Hiperbólicas y observar los resultados con el algoritmo modificado.
7.2.2 EDP Elípticas método implícito
con el resultado desarrollado en EDP elípticas para:
\frac{\partial ^2 u}{\partial x^2} + \frac{\partial ^2 u}{ \partial y^2} = 0y con el supuesto que: \lambda = \frac{(\Delta y)^2}{(\Delta x)^2} = 1
se puede plantear que:
u_{i+1,j}-4u_{i,j}+u_{i-1,j} + u_{i,j+1} +u_{i,j-1} = 0con lo que para el método implícito, se plantea un sistema de ecuaciones para determinar los valores en cada punto desconocido.
j=1, i =1
u_{2,1}-4u_{1,1}+u_{0,1} + u_{1,2} +u_{1,0} = 0 u_{2,1}-4u_{1,1}+Ta + u_{1,2} +Tc= 0 -4u_{1,1}+u_{2,1}+u_{1,2} = -(Tc+Ta)j=1, i =2
u_{3,1}-4u_{2,1}+u_{1,1} + u_{2,2} +u_{2,0} = 0 u_{3,1}-4u_{2,1}+u_{1,1} + u_{2,2} +Tc = 0 u_{1,1}-4u_{2,1}+u_{3,1}+ u_{2,2}= -Tcj=1, i=3
u_{4,1}-4u_{3,1}+u_{2,1} + u_{3,2} +u_{3,0} = 0 Tb-4u_{3,1}+u_{2,1} + u_{3,2} +Tc = 0 u_{2,1} -4u_{3,1} + u_{3,2} = -(Tc+Tb)j=2, i=1
u_{2,2}-4u_{1,2}+u_{0,2} + u_{1,3} +u_{1,1} = 0 u_{2,2}-4u_{1,2}+Ta + u_{1,3} +u_{1,1} = 0 -4u_{1,2}+u_{2,2}+u_{1,1}+u_{1,3} = -Taj = 2, i = 2
u_{1,2}-4u_{2,2}+u_{3,2} + u_{2,3} +u_{2,1} = 0j = 2, i = 3
u_{4,2}-4u_{3,2}+u_{2,2} + u_{3,3} +u_{3,1} = 0 Tb-4u_{3,2}+u_{2,2} + u_{3,3} +u_{3,1} = 0 u_{2,2} -4u_{3,2}+ u_{3,3} +u_{3,1} = -Tbj=3, i = 1
u_{2,3}-4u_{1,3}+u_{0,3} + u_{1,4} +u_{1,2} = 0 u_{2,3}-4u_{1,3}+Ta + Td +u_{1,2} = 0 -4u_{1,3}+u_{2,3}+u_{1,2} = -(Td+Ta)j=3, i = 2
u_{3,3}-4u_{2,3}+u_{1,3} + u_{2,4} +u_{2,2} = 0 u_{3,3}-4u_{2,3}+u_{1,3} + Td +u_{2,2} = 0 +u_{1,3} -4u_{2,3}+u_{3,3} +u_{2,2} = -Tdj=3, i=3
u_{4,3}-4u_{3,3}+u_{2,3} + u_{3,4} +u_{3,2} = 0 Tb-4u_{3,3}+u_{2,3} + Td +u_{3,2} = 0 u_{2,3}-4u_{3,3}+u_{3,2} = -(Td+Tb)con las ecuaciones se arma una matriz:
A = np.array([
[-4, 1, 0, 1, 0, 0, 0, 0, 0],
[ 1,-4, 1, 0, 1, 0, 0, 0, 0],
[ 0, 1,-4, 0, 0, 1, 0, 0, 0],
[ 1, 0, 0,-4, 1, 0, 1, 0, 0],
[ 0, 1, 0, 1,-4, 1, 0, 1, 0],
[ 0, 0, 1, 0, 1,-4, 0, 0, 1],
[ 0, 0, 0, 1, 0, 0,-4, 1, 0],
[ 0, 0, 0, 0, 1, 0, 1,-4, 1],
[ 0, 0, 0, 0, 0, 1, 0, 1,-4],
])
B = np.array([-(Tc+Ta),-Tc,-(Tc+Tb),
-Ta, 0, -Tb,
-(Td+Ta),-Td,-(Td+Tb)])
que al resolver el sistema de ecuaciones se obtiene:
>>> Xu
array([ 56.43, 55.71, 56.43, 60. , 60. , 60. , 63.57, 64.29,
63.57])
ingresando los resultados a la matriz u:
xi= [ 0. 0.5 1. 1.5 2. ] yj= [ 0. 0.38 0.75 1.12 1.5 ] matriz u [[ 60. 60. 60. 60. 60. ] [ 50. 56.43 60. 63.57 70. ] [ 50. 55.71 60. 64.29 70. ] [ 50. 56.43 60. 63.57 70. ] [ 60. 60. 60. 60. 60. ]] >>>
Algoritmo usado para resolver el problema:
# Ecuaciones Diferenciales Parciales # Elipticas. Método implícito import numpy as np # INGRESO # Condiciones iniciales en los bordes Ta = 60 Tb = 60 Tc = 50 Td = 70 # dimensiones de la placa x0 = 0 xn = 2 y0 = 0 yn = 1.5 # discretiza, supone dx=dy tramosx = 4 tramosy = 4 dx = (xn-x0)/tramosx dy = (yn-y0)/tramosy maxitera = 100 tolera = 0.0001 A = np.array([ [-4, 1, 0, 1, 0, 0, 0, 0, 0], [ 1,-4, 1, 0, 1, 0, 0, 0, 0], [ 0, 1,-4, 0, 0, 1, 0, 0, 0], [ 1, 0, 0,-4, 1, 0, 1, 0, 0], [ 0, 1, 0, 1,-4, 1, 0, 1, 0], [ 0, 0, 1, 0, 1,-4, 0, 0, 1], [ 0, 0, 0, 1, 0, 0,-4, 1, 0], [ 0, 0, 0, 0, 1, 0, 1,-4, 1], [ 0, 0, 0, 0, 0, 1, 0, 1,-4], ]) B = np.array([-(Tc+Ta),-Tc,-(Tc+Tb), -Ta,0,-Tb, -(Td+Ta),-Td,-(Td+Tb)]) # PROCEDIMIENTO # Resuelve sistema ecuaciones Xu = np.linalg.solve(A,B) [nx,mx] = np.shape(A) xi = np.arange(x0,xn+dx,dx) yj = np.arange(y0,yn+dy,dy) n = len(xi) m = len(yj) u = np.zeros(shape=(n,m),dtype=float) u[:,0] = Tc u[:,m-1] = Td u[0,:] = Ta u[n-1,:] = Tb u[1:1+3,1] = Xu[0:0+3] u[1:1+3,2] = Xu[3:3+3] u[1:1+3,3] = Xu[6:6+3] # SALIDA np.set_printoptions(precision=2) print('xi=') print(xi) print('yj=') print(yj) print('matriz u') print(u)
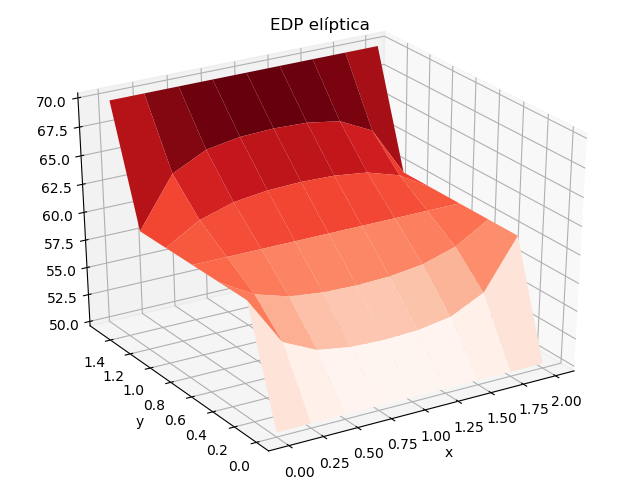
La gráfica de resultados se obtiene de forma semejante al ejercicio con método iterativo.
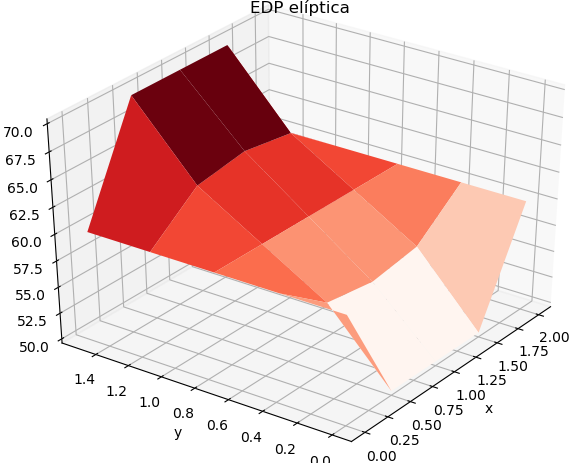
# Gráfica import matplotlib.pyplot as plt from matplotlib import cm from mpl_toolkits.mplot3d import Axes3D X, Y = np.meshgrid(xi, yj) U = np.transpose(u) # ajuste de índices fila es x figura = plt.figure() ax = Axes3D(figura) ax.plot_surface(X, Y, U, rstride=1, cstride=1, cmap=cm.Reds) plt.title('EDP elíptica') plt.xlabel('x') plt.ylabel('y') plt.show()
Se podría estandarizar un poco más el proceso para que sea realizado por el algoritmo y sea más sencillo generar la matriz con más puntos. Tarea.
7.2.1 EDP Elípticas método iterativo
con el resultado desarrollado en EDP elípticas para:
\frac{\partial ^2 u}{\partial x^2} + \frac{\partial ^2 u}{ \partial y^2} = 0y con el supuesto que: \lambda = \frac{(\Delta y)^2}{(\Delta x)^2} = 1
se puede plantear que:
u_{i+1,j}-4u_{i,j}+u_{i-1,j} + u_{i,j+1} +u_{i,j-1} = 0que reordenando para un punto central desconocido se convierte a:
u_{i,j} = \frac{1}{4} \big[ u_{i+1,j}+u_{i-1,j} + u_{i,j+1} +u_{i,j-1} \big]con lo que se interpreta que cada punto central es el resultado del promedio de los puntos alrededor del rombo formado en la malla.
El cálculo numerico se puede realizar de forma iterativa haciendo varias pasadas en la matriz, promediando cada punto. Para revisar las iteraciones se controla la convergencia junto con un máximo de iteraciones.
# Ecuaciones Diferenciales Parciales # Elipticas. Método iterativo import numpy as np # INGRESO # Condiciones iniciales en los bordes Ta = 60 Tb = 60 Tc = 50 Td = 70 # dimensiones de la placa x0 = 0 xn = 2 y0 = 0 yn = 1.5 # discretiza, supone dx=dy dx = 0.25 dy = 0.25 maxitera = 100 tolera = 0.0001 # PROCEDIMIENTO xi = np.arange(x0,xn+dx,dx) yj = np.arange(y0,yn+dy,dy) n = len(xi) m = len(yj) # Matriz u u = np.zeros(shape=(n,m),dtype = float) # valores en fronteras u[0,:] = Ta u[n-1,:] = Tb u[:,0] = Tc u[:,m-1] = Td # valor inicial de iteración promedio = (Ta+Tb+Tc+Td)/4 u[1:n-1,1:m-1] = promedio # iterar puntos interiores itera = 0 converge = 0 while not(itera>=maxitera or converge==1): itera = itera +1 nueva = np.copy(u) for i in range(1,n-1): for j in range(1,m-1): u[i,j] = (u[i-1,j]+u[i+1,j]+u[i,j-1]+u[i,j+1])/4 diferencia = nueva-u erroru = np.linalg.norm(np.abs(diferencia)) if (erroru<tolera): converge = 1 # SALIDA np.set_printoptions(precision=2) print('converge = ', converge) print('xi=') print(xi) print('yj=') print(yj) print('matriz u') print(u)
Un ejemplo de resultados:
converge = 1 xi= [ 0. 0.25 0.5 0.75 1. 1.25 1.5 1.75 2. ] yi= [ 0. 0.25 0.5 0.75 1. 1.25 1.5 ] matriz u [[ 50. 60. 60. 60. 60. 60. 70. ] [ 50. 55.6 58.23 60. 61.77 64.4 70. ] [ 50. 54.15 57.34 60. 62.66 65.85 70. ] [ 50. 53.67 56.97 60. 63.03 66.33 70. ] [ 50. 53.55 56.87 60. 63.13 66.45 70. ] [ 50. 53.67 56.97 60. 63.03 66.33 70. ] [ 50. 54.15 57.34 60. 62.66 65.85 70. ] [ 50. 55.6 58.23 60. 61.77 64.4 70. ] [ 50. 60. 60. 60. 60. 60. 70. ]] >>>
Cuyos valores se interpretan mejor en una gráfica, en este caso 3D:
La gráfica de resultados requiere ajuste de ejes, pues el índice de filas es el eje x, y las columnas es el eje y. La matriz graficada se obtiene como la transpuesta de u
# Gráfica import matplotlib.pyplot as plt from matplotlib import cm from mpl_toolkits.mplot3d import Axes3D X, Y = np.meshgrid(xi, yj) U = np.transpose(u) # ajuste de índices fila es x figura = plt.figure() ax = Axes3D(figura) ax.plot_surface(X, Y, U, rstride=1, cstride=1, cmap=cm.Reds) plt.title('EDP elíptica') plt.xlabel('x') plt.ylabel('y') plt.show()