
Referencia: Chapra 28.2 p831 pdf855, Rodriguez 9.2.1 p263
https://es.wikipedia.org/wiki/Ecuaciones_Lotka%E2%80%93Volterra
https://en.wikipedia.org/wiki/Lotka%E2%80%93Volterra_equations
Modelos depredador-presa y caos. Ecuaciones Lotka-Volterra. En el sistema de ecuaciones:
\frac{dx}{dt} = ax - bxy \frac{dy}{dt} = -cy + dxy
| variables | |
| x |
= número de presas |
| y | = número de depredadores |
| t | = tiempo de observación |
| coeficientes | |
| a | = razón de crecimiento de la presa, (0.5) |
| c | = razón de muerte del depredador (0.35) |
| b | = efecto de la interacción depredador-presa sobre la muerte de la presa (0.7) |
| d | = efecto de la interacción depredador-presa sobre el crecimiento del depredador, (0.35) |
Los términos que multiplican xy hacen que las ecuaciones sean no lineales.
Para resolver el sistema, se plantean las ecuaciones de forma simplificada para el algoritmo:
f = a x - b x y g = -c y + d x y
con valores iniciales: t = 0, x = 2, y = 1, h = 0.5
Observe que la variable tiempo no se encuentra en las expresiones f y g, h se aplica a tiempo.
Planteamiento que se ingresan al algoritmo con el algoritmo rungekutta2_fg(fx,gx,x0,y0,z0,h,muestras), propuesto en
Al ejecutar el algoritmo se obtienen los siguientes resultados:
[ ti, xi, yi] [[ 0. 2. 1. ] [ 0.5 1.754875 1.16975 ] [ 1. 1.457533 1.302069] [ 1.5 1.167405 1.373599] [ 2. 0.922773 1.381103] [ 2.5 0.734853 1.33689 ] [ 3. 0.598406 1.258434] ... [ 49. 1.11309 1.389894] [ 49.5 0.876914 1.38503 ] [ 50. 0.698717 1.331107] [ 50.5 0.570884 1.246132]] >>>
Los resultados se pueden observar de diferentes formas:
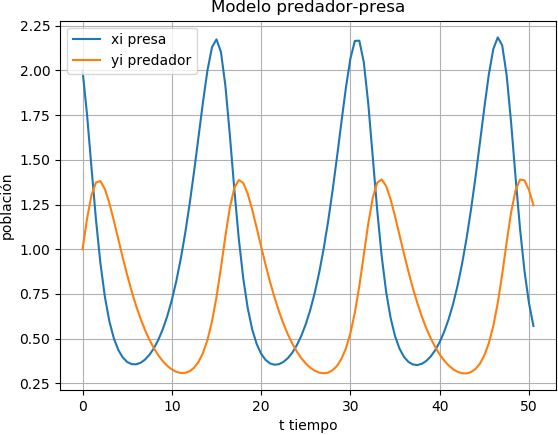
a) Cada variable xi, yi versus ti, es decir cantidad de animales de cada especie durante el tiempo de observación
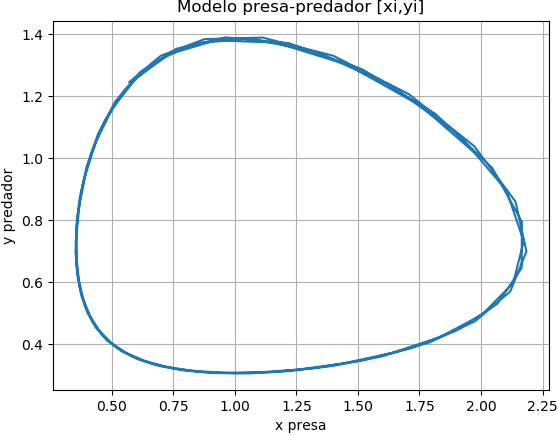
b) Independiente de la unidad de tiempo, xi vs yi, muestra la relación entre la cantidad de presas y predadores. Relación que es cíclica y da la forma a la gráfica.
Algoritmo con Python
Las instrucciones del algoritmo en Python usadas en el problema son:
# Modelo predador-presa de Lotka-Volterra # Sistemas EDO con Runge Kutta de 2do Orden import numpy as np def rungekutta2_fg(f,g,t0,x0,y0,h,muestras): tamano = muestras +1 tabla = np.zeros(shape=(tamano,3),dtype=float) tabla[0] = [t0,x0,y0] ti = t0 xi = x0 yi = y0 for i in range(1,tamano,1): K1x = h * f(ti,xi,yi) K1y = h * g(ti,xi,yi) K2x = h * f(ti+h, xi + K1x, yi+K1y) K2y = h * g(ti+h, xi + K1x, yi+K1y) xi = xi + (1/2)*(K1x+K2x) yi = yi + (1/2)*(K1y+K2y) ti = ti + h tabla[i] = [ti,xi,yi] tabla = np.array(tabla) return(tabla) # PROGRAMA ------------------ # INGRESO # Parámetros de las ecuaciones a = 0.5 b = 0.7 c = 0.35 d = 0.35 # Ecuaciones f = lambda t,x,y : a*x -b*x*y g = lambda t,x,y : -c*y + d*x*y # Condiciones iniciales t0 = 0 x0 = 2 y0 = 1 # parámetros del algoritmo h = 0.5 muestras = 101 # PROCEDIMIENTO tabla = rungekutta2_fg(f,g,t0,x0,y0,h,muestras) ti = tabla[:,0] xi = tabla[:,1] yi = tabla[:,2] # SALIDA np.set_printoptions(precision=6) print(' [ ti, xi, yi]') print(tabla)
Los resultados numéricos se usan para generar las gráficas presentadas, añadiendo las instrucciones:
# Grafica tiempos vs población import matplotlib.pyplot as plt plt.plot(ti,xi, label='xi presa') plt.plot(ti,yi, label='yi predador') plt.title('Modelo predador-presa') plt.xlabel('t tiempo') plt.ylabel('población') plt.legend() plt.grid() plt.show() # gráfica xi vs yi plt.plot(xi,yi) plt.title('Modelo presa-predador [xi,yi]') plt.xlabel('x presa') plt.ylabel('y predador') plt.grid() plt.show()
Tarea: Añadir la animación de la gráfica usando la variable tiempo para mostrar un punto que marque el par ordenado[x,y] al variar t.