Referencia: Chapra 18.2 pdf 540, Burden 9Ed 3.1 p108, Rodriguez 6.2 p195
El polinomio de interpolación de Lagrange es una reformulación del polinomio de interpolación de Newton que el método evita el cálculo de las diferencias divididas. El método tolera las diferencias entre distancias x de los puntos de muestra.
El polinomio de Lagrange se construye a partir de las fórmulas:
f_{n} (x) = \sum_{i=0}^{n} L_{i} (x) f(x_{i}) L_{i} (x) = \prod_{j=0, j \neq i}^{n} \frac{x-x_j}{x_i - x_j}Donde una vez que se han seleccionado los puntos a usar que generan la misma cantidad de términos que puntos.
Ejemplo: Polinomio Interpolante de Lagrange con grado 3
Dados los 4 puntos en la tabla se requiere generar un polinomio de grado 3 de la forma:
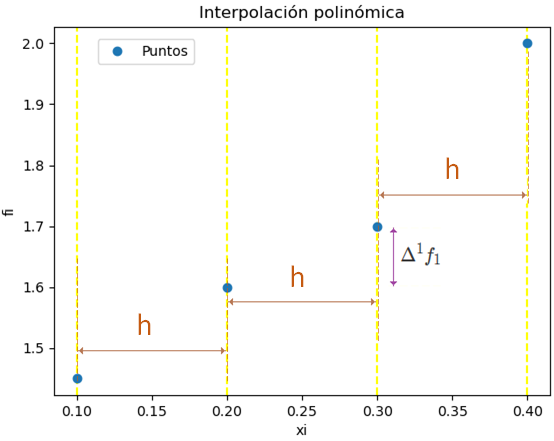
p(x) = a_0 x^3 + a_1 x^2 + a_2 x^1 + a_3| xi | 0 | 0.2 | 0.3 | 0.4 |
|---|---|---|---|---|
| fi | 1 | 1.6 | 1.7 | 2.0 |
Revisando la aplicación de la fórmula se tiene que calcular cuatro términos,
término 1
L_{0} (x) = \frac{(x-0.2)(x-0.3)(x-0.4)}{(0-0.2)(0-0.3)(0-0.4)}término 2
L_{1} (x) = \frac{(x-0)(x-0.3)(x-0.4)}{(0.2-0)(0.2-0.3)(0.2-0.4)}término 3
L_{2} (x) = \frac{(x-0)(x-0.2)(x-0.4)}{(0.3-0)(0.3-0.2)(0.3-0.4)}término 4
L_{3} (x) = \frac{(x-0)(x-0.2)(x-0.3)}{(0.4-0)(0.4-0.2)(0.4-0.3)}se construye el polinomio usando la fórmula para fn(x) para cada valor fi,
p_3(x) = 1 L_{0} (x) + 1.6 L_{1} (x) + 1.7 L_{2} (x) + 2 L_{3} (x) p_3(x) = 1 \frac{(x-0.2)(x-0.3)(x-0.4)}{(0-0.2)(0-0.3)(0-0.4)} + + 1.6 \frac{(x-0)(x-0.3)(x-0.4)}{(0.2-0)(0.2-0.3)(0.2-0.4)} + 1.7 \frac{(x-0)(x-0.2)(x-0.4)}{(0.3-0)(0.3-0.2)(0.3-0.4)} + 2 \frac{(x-0)(x-0.2)(x-0.3)}{(0.4-0)(0.4-0.2)(0.4-0.3)}La simplificación de la expresión del polinomio se puede dejar como tarea.
Una forma de verificar que el polinomio es correcto es usar un punto original xi[i] y comprobar que la evaluación tiene como resultado fi[i].

xi = np.array([0, 0.2, 0.3, 0.4]) fi = np.array([1, 1.6, 1.7, 2.0])
Algoritmo en Python
En el algoritmo en Python, para construir las expresiones de cada término se usa la forma simbólica con Sympy.
En cada término Li(x) se usan todos los elementos i , excepto el mismo elemento i, en el numerador y denominador de la expresión.
En polinomio se agrupan todos los términos multiplicados por su respectivo valor fi[i].
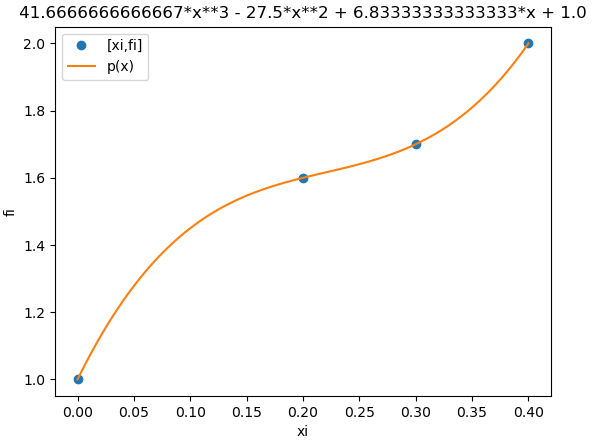
valores de fi: [1. 1.6 1.7 2. ] divisores en L(i): [-0.024 0.004 -0.003 0.008] Polinomio de Lagrange, expresiones 400.0*x*(x - 0.4)*(x - 0.3) - 566.666666666667*x*(x - 0.4)*(x - 0.2) + 250.0*x*(x - 0.3)*(x - 0.2) - 41.6666666666667*(x - 0.4)*(x - 0.3)*(x - 0.2) Polinomio de Lagrange: 41.666666666667*x**3 - 27.5*x**2 + 6.8333333333334*x + 1.0
Las expresiones del polinomio contiene los binomios en su forma básica, para resolver y simplificar las ecuaciones se usa polinomio.expand().
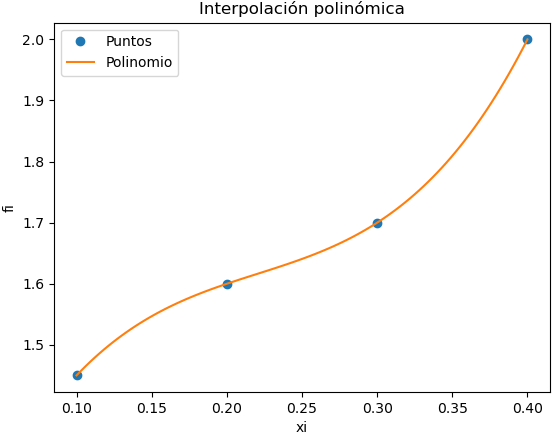
Para realizar la gráfica del polinomio es conveniente convertirlo a la forma lambda con Numpy, de esta forma se evalúa en una sola linea todos los puntos para el intervalo [a,b] en x.
# Interpolacion de Lagrange # divisoresL solo para mostrar valores import numpy as np import sympy as sym import matplotlib.pyplot as plt # INGRESO , Datos de prueba xi = np.array([0, 0.2, 0.3, 0.4]) fi = np.array([1, 1.6, 1.7, 2.0]) # PROCEDIMIENTO # Polinomio de Lagrange n = len(xi) x = sym.Symbol('x') polinomio = 0 divisorL = np.zeros(n, dtype = float) for i in range(0,n,1): # Termino de Lagrange numerador = 1 denominador = 1 for j in range(0,n,1): if (j!=i): numerador = numerador*(x-xi[j]) denominador = denominador*(xi[i]-xi[j]) terminoLi = numerador/denominador polinomio = polinomio + terminoLi*fi[i] divisorL[i] = denominador # simplifica el polinomio polisimple = polinomio.expand() # para evaluación numérica px = sym.lambdify(x,polisimple) # Puntos para la gráfica muestras = 101 a = np.min(xi) b = np.max(xi) pxi = np.linspace(a,b,muestras) pfi = px(pxi) # SALIDA print(' valores de fi: ',fi) print('divisores en L(i): ',divisorL) print() print('Polinomio de Lagrange, expresiones') print(polinomio) print() print('Polinomio de Lagrange: ') print(polisimple) # Gráfica plt.plot(xi,fi,'o', label = 'Puntos') plt.plot(pxi,pfi, label = 'Polinomio') plt.legend() plt.xlabel('xi') plt.ylabel('fi') plt.title('Interpolación Lagrange') plt.show()